

Active heave compensation system of underwater robot
An underwater robot and heave compensation technology, which is applied in the direction of clockwork mechanism and hoisting device, can solve the problems of unable to meet the requirements of stable retraction and deployment of cable underwater robots, limited compensation ability, and low compensation accuracy, and achieve Ease of engineering realization, wide compensation range and large rotation range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
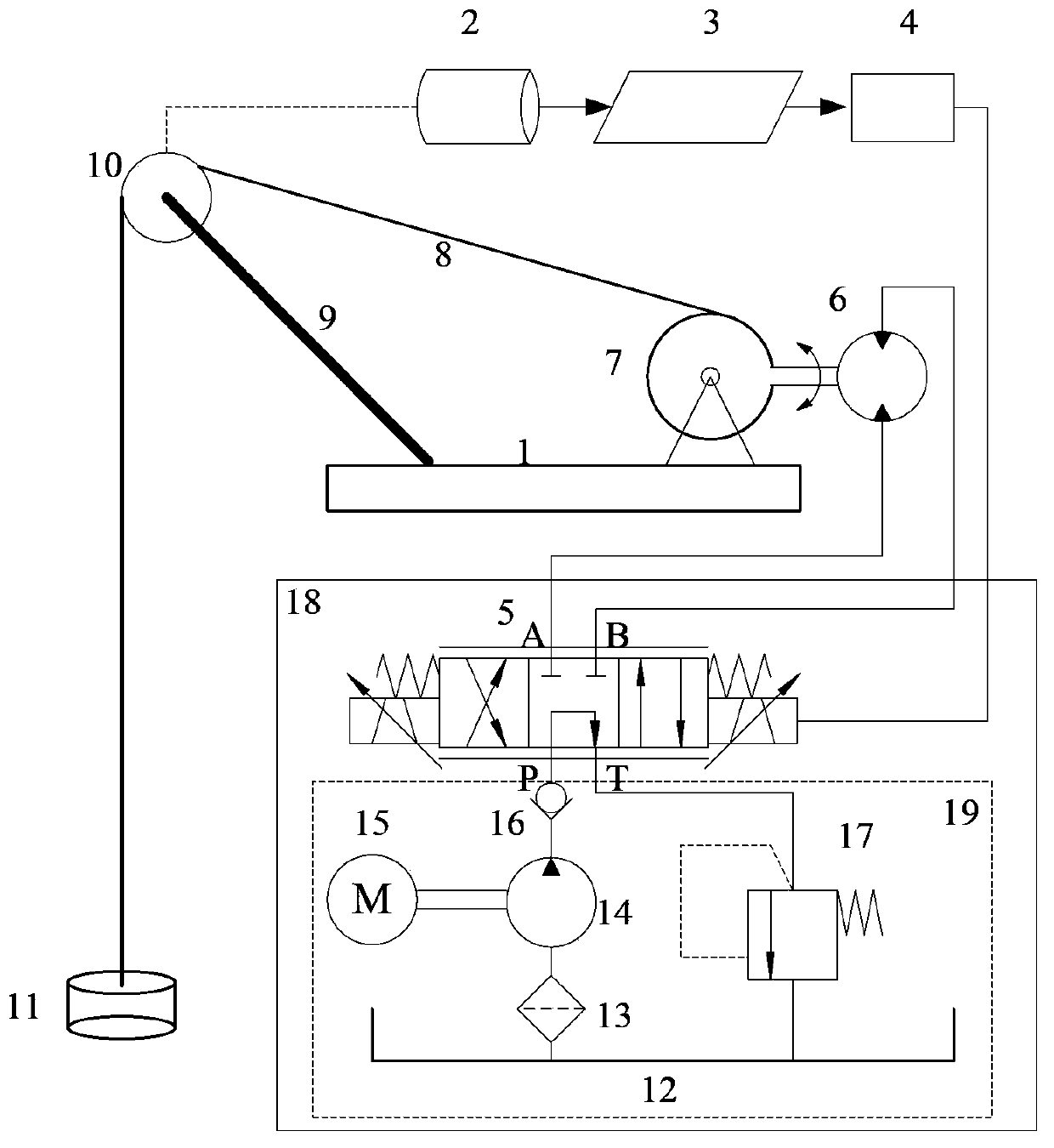
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0021] A heave motion measurement module, a signal processing module and a control unit are added on the basis of the existing conventional cabled underwater robot retractable device. The hydraulic winch is fixed on the deck of the mother ship, and the armored cable is wound on the drum of the hydraulic winch, and after bypassing the fixed pulley of the bracket, it is connected to the combination of the repeater and the underwater robot. The inlet of the hydraulic pump is connected to the outlet of the filter, the inlet of the filter is connected to the fuel tank, the outlet of the hydraulic pump is connected to the P port of the electro-hydraulic proportional valve through a check valve, and the T port of the electro-hydraulic proportional valve is connected to the fuel tank through a safety valve , A port and B port of the electro-hydraulic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More