

Underwater vehicle all-attitude determination method based on magnetic gradient tensor measurement
A gradient tensor and determination method technology, applied in the direction of measuring devices, ground navigation, surveying and navigation, etc., can solve the problems of unable to receive GPS signals normally, expensive, and the strength of the geomagnetic field cannot provide attitude measurement information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
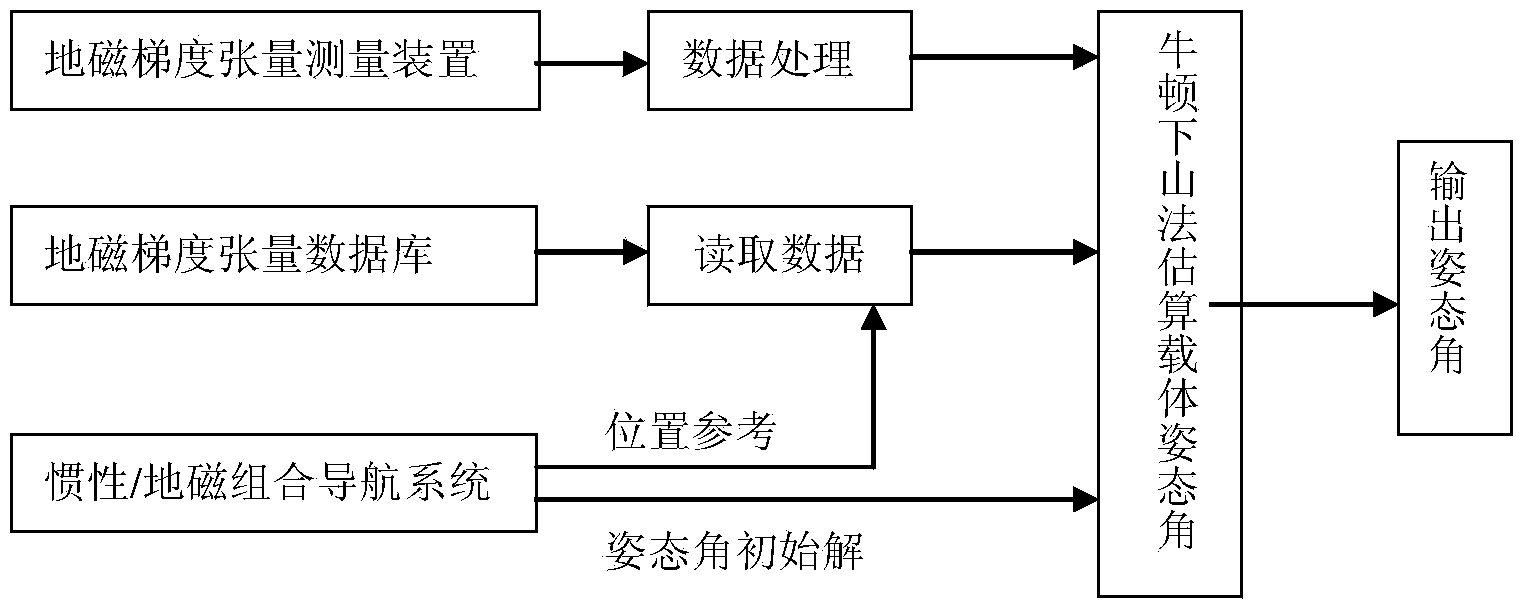
[0030] The invention provides a method for determining the attitude of an underwater carrier, which can accurately invert the attitude angle information of the carrier; solves the problem that a single magnetometer cannot rely on the geomagnetic field to determine the attitude independently, and provides an underwater carrier attitude Estimates provide an autonomous, covert approach.
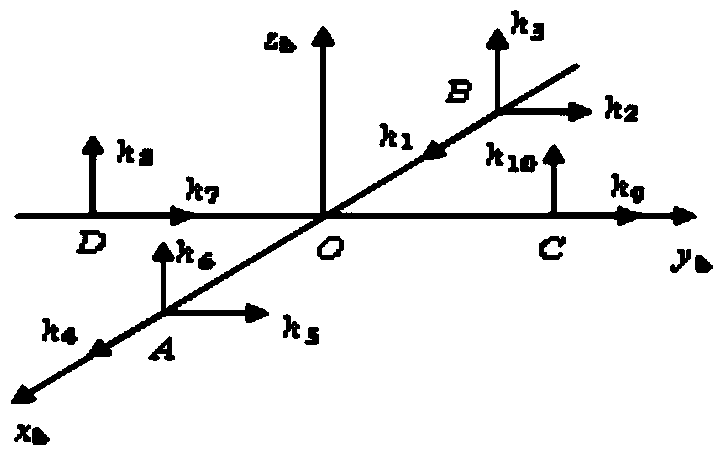
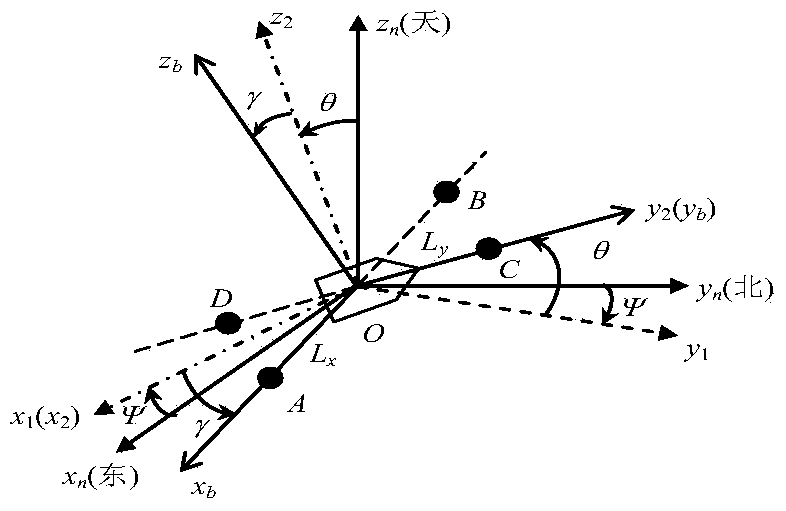
[0031] A method for determining underwater full attitude based on geomagnetic gradient tensor measurement of the present invention, the vector magnetometer group strapped down to the underwater carrier constitutes a geomagnetic gradient tensor measurement device, and measures five independent geomagnetic gradient tensors under the carrier system portion. From the geomagnetic gradient tensor database based on the reference position output by the inertial / geomagnetic integrated navigation system, 5 independent components of the geomagnetic gradient tensor in the local geographic system are extract...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More