

Method for operating a robot, robot, translation robot, robot system and method for operating the robot system
A technology of manipulators and driving devices, applied in manipulators, general control systems, program-controlled manipulators, etc., can solve the problem that the delta manipulator cannot be used, and achieve the effect of shortening the dwell time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
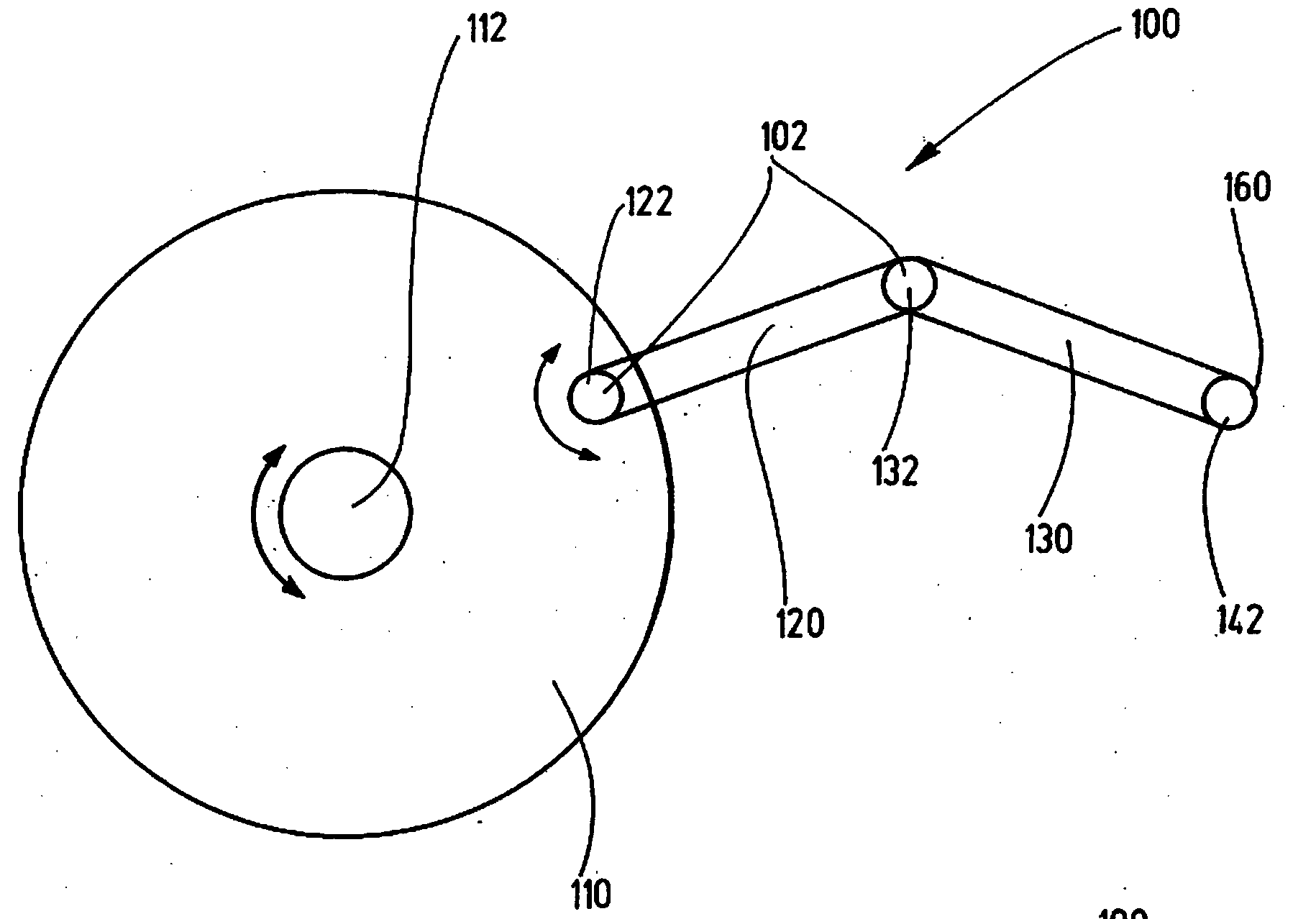
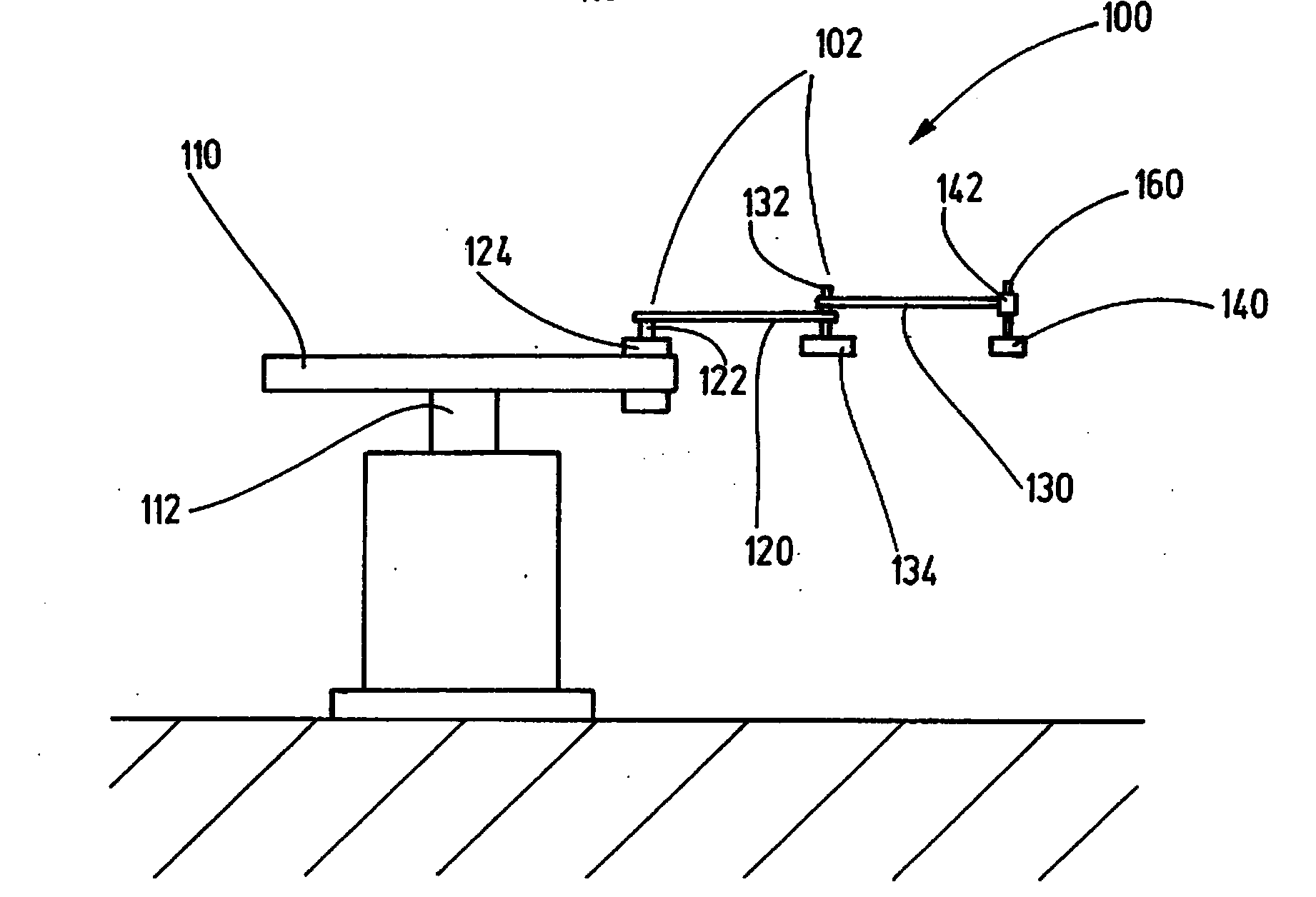
[0051] figure 1 and figure 2 A first manipulator is depicted having a crank element 110 rotatable about a first axis of rotation 112 . The first coupling element 120 is connected to the second rotary shaft 122 via the rotary hinge 102 . On the side opposite to the second rotation shaft 122, the first coupling element 120 has a third rotation shaft 132 on the other rotary hinge 102, to which the second coupling element 130 is rotatably connected. At the end of the second coupling element 130 is provided a fourth rotating shaft 142 which corresponds to the actuator rotating fulcrum 160 . As will also be described below, a third coupling element and / or a fourth coupling element may be connected to the actuator rotational fulcrum 160 . especially from figure 2It can be seen that a driving device 124 is provided on the second rotating shaft 122, and a driving device 134 is provided on the third rotating shaft 132. The coupling element 120 and the coupling element 130 can be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More