

Time delay compensation method in inertia gravity matching combined navigation system
A technology of integrated navigation system and inertial navigation system, which is applied in the field of integrated navigation and can solve problems such as measurement data delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The invention and the embodiments will be further described below in conjunction with the accompanying drawings.
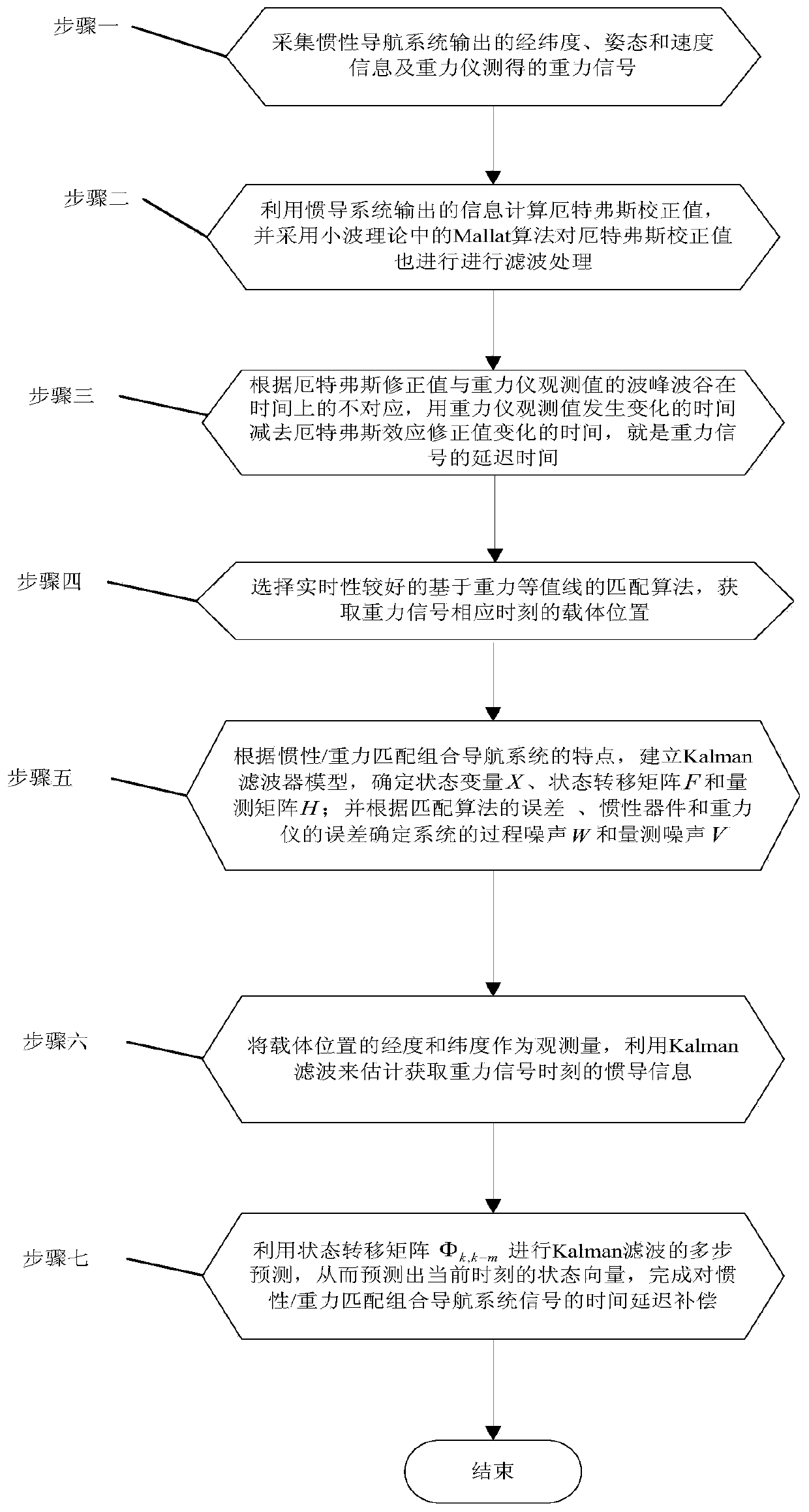
[0066] The present invention is a compensation method for time delay in an inertial / gravity matching integrated navigation system, the flow chart of which is as follows figure 1 shown, including the following steps:
[0067] Step 1. Collect the latitude output by the inertial navigation system Longitude λ, heading ψ and speed information V and gravity signal measured by the gravimeter;
[0068] Specifically, each set of data includes the latitude collected by the inertial navigation system Longitude λ, heading ψ, velocity information V and the gravity signal measured by the gravimeter, record 1 set of data per second, and save it in a file. When recording, it is necessary to ensure that the time of each group of signals is synchronized.
[0069] Step 2. Use the latitude output by the inertial navigation system Heading ψ and velocity V calculate Utte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More