

An autonomous take-off and landing system for rotary-wing unmanned aerial vehicles based on a three-layer character-shaped multi-color landing pad
An unmanned, zigzag-shaped rotor technology, applied in three-dimensional position/channel control and other directions, can solve the problems of limited navigation range of the vision system, blurred landing pad information, loss of landing pad information, etc., and achieve simplified image processing algorithms, small size, Lightweight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
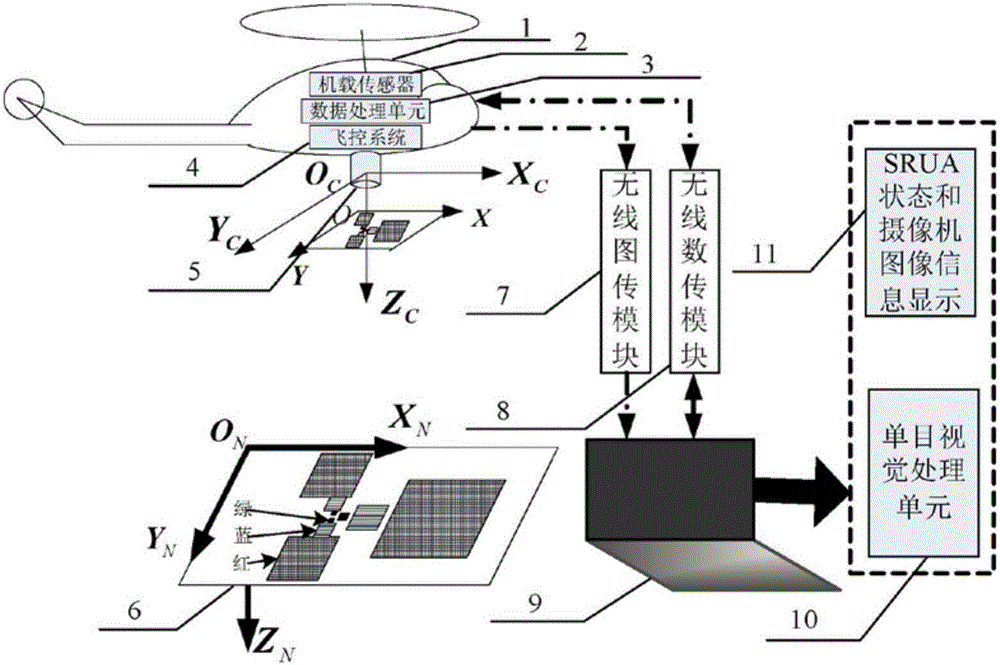
[0024] Such as figure 1 As shown, the present invention mainly comprises rotor UAV (1), airborne sensor (2), data processing unit (3), flight control system (4), airborne camera (5), ground landing pad (6), The wireless image transmission module (7), the wireless data transmission module (8) and the ground monitoring station (9); the airborne sensor (2), the data processing unit (3), and the flight control system (4) are respectively loaded on the rotor UAV (1), the ground monitoring station (9) is composed of a visual processing unit (10) and a display terminal (11).
[0025] The rotor UAV (1) is the carrier of the airborne sensor (2), the data processing unit (3) and the flight control system (4), and it is the research subject of the autonomous take-off and landing system of the rotor UAV;
[0026] The airborne sensors (2) are inertial measurement unit (IMU), global positioning system (GPS) receiver, magnetic compass, barometric altimeter, ultrasound;
[0027] The hardwar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More