

Rope-driven exoskeleton type upper-limb rehabilitation robot system
A rehabilitation robot and rope-driven technology, used in passive exercise equipment, physical therapy and other directions, can solve the problems of cumbersome mechanism, increase the inertia of human motion, complex shoulder joints, etc., achieve easy installation and adjustment, simple structure, low Effects of Additional Mass and Inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
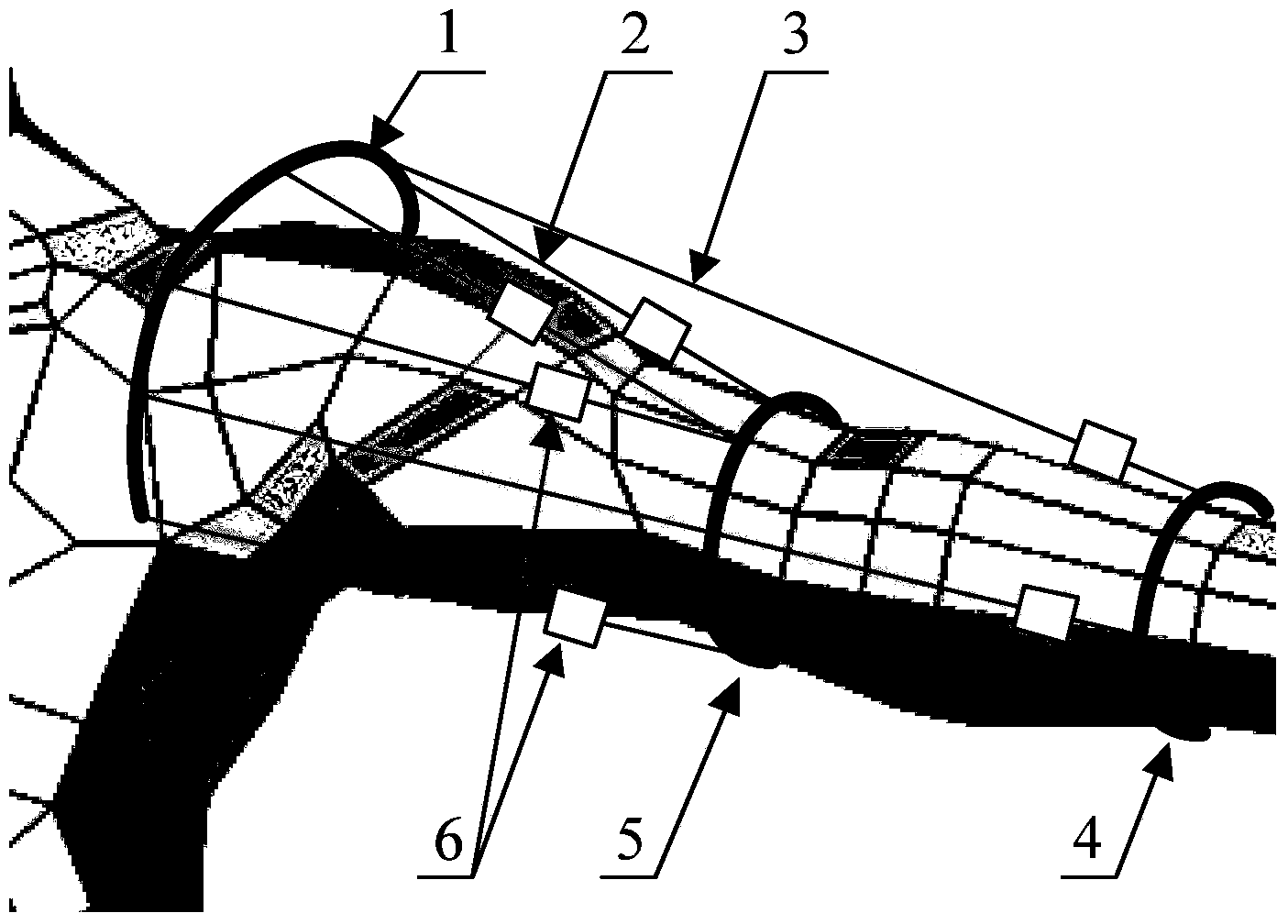
[0024] like figure 1 and figure 2 As shown in the figure, the present invention is a rope-driven exoskeleton type upper limb rehabilitation robot system, including a support seat on which a shoulder cable frame 1, an upper arm ring 5 and a forearm ring are fixed to be adjusted and positioned above the shoulder joint of the human body 4 are respectively fixed on the upper arm and forearm of the human body, the forearm cable 3 passes through the cable hole of the shoulder cable frame 1 and connects the forearm ring 4, and the upper arm cable 2 also passes through the cable hole of the shoulder cable frame 1 and connects the upper arm ring 5, The upper arm cable 2 and the forearm cable 3 are connected in series with a tension pressure sensor 6 for measuring the tension of the rope in real time, a control system connected with the tension...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More