

Navigation control device and navigation control method applicable to collaborative transportation of cranes
A technology of control devices and cranes, applied in transportation and packaging, comprehensive factory control, electrical program control, etc., can solve problems such as unsuitable for carrying valuables, poor external environment resistance, and low risk of carrying efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The structural features of the present invention will now be described in detail in conjunction with the accompanying drawings.
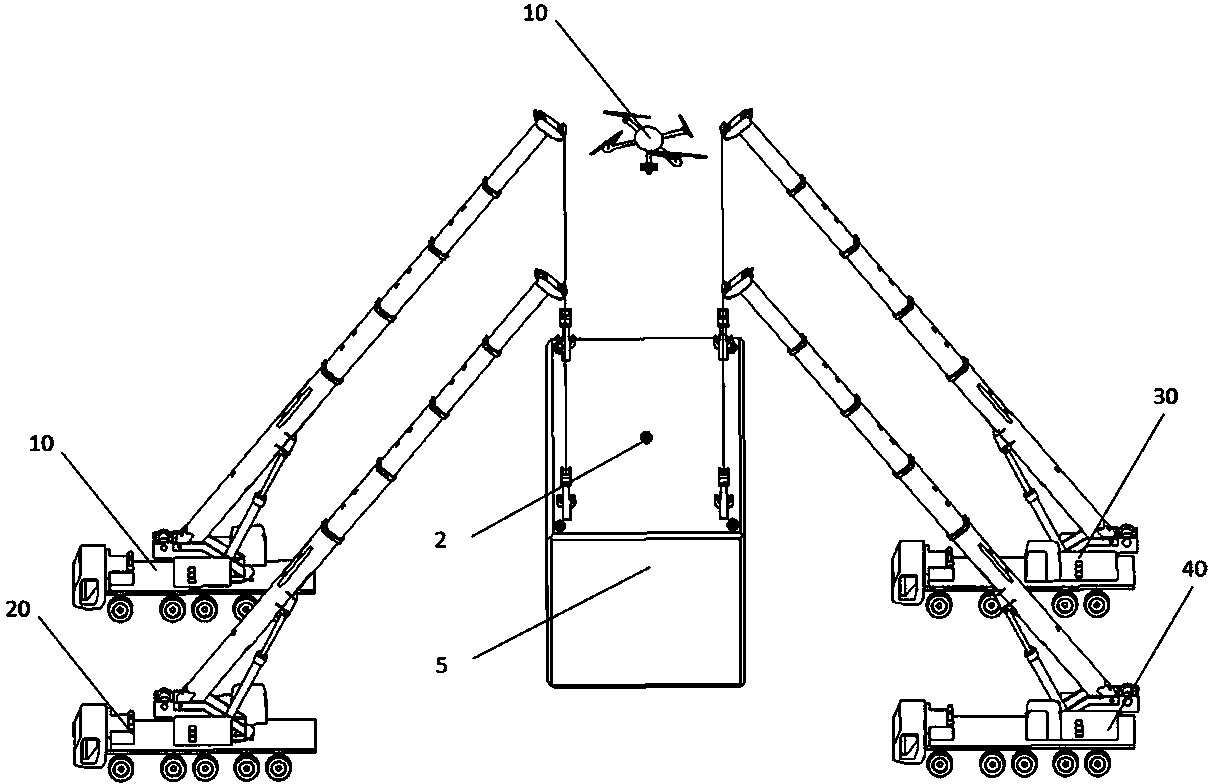
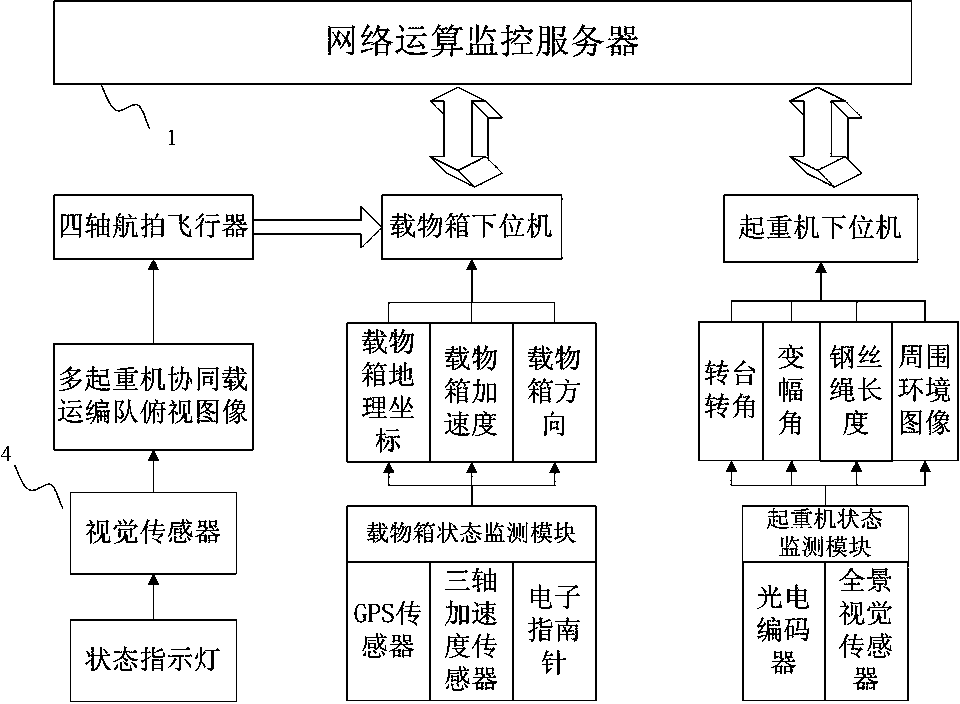
[0036] see figure 1, a navigation control device for crane cooperative transportation, aimed at the operating environment in which four cranes jointly lift one cargo box 5 . The four cranes are sequentially recorded as the first crane 10 , the second crane 20 , the third crane 30 and the fourth crane 40 . see figure 2 , the four cranes are equipped with crane control systems to control the movement of the cranes, which are the first crane control system 11, the second crane control system 21, the third crane control system 31 and the fourth crane control system 41, in addition , see figure 2 , equipped with a network computing monitoring server 1, a load box lower computer 3, a four-axis aerial vehicle 4, a load box status monitoring module 6, a wireless communication device, a load box position indicator light 2, four crane status moni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More