

Industrial robot workpiece positioning grabbing method and system based on visual guidance
An industrial robot, vision-guided technology, applied in manipulators, manufacturing tools, etc., can solve problems such as target occlusion, grasping failure, and cost increase
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
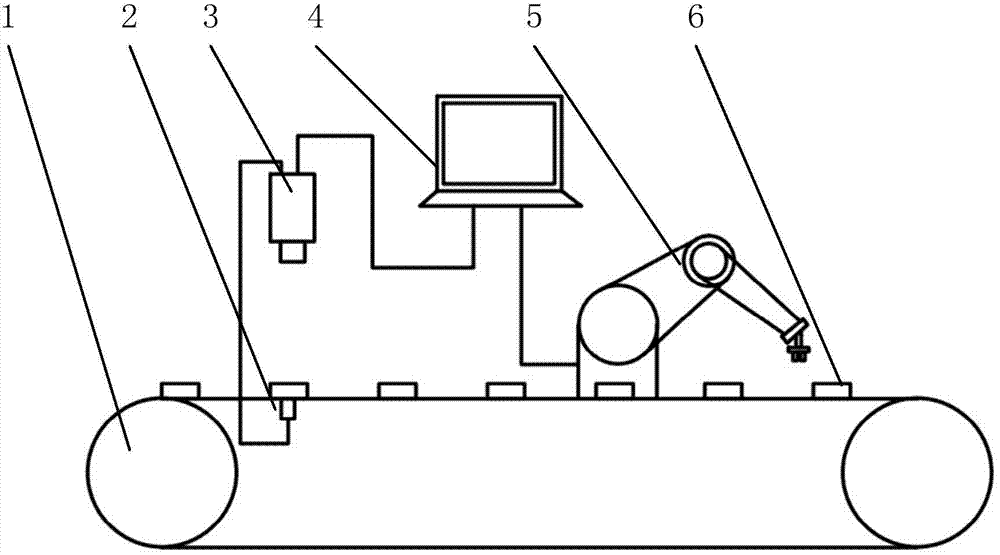
[0053] Such as figure 1 As shown, a vision-guided industrial robot workpiece positioning and grasping system includes: a conveyor belt 1, a photoelectric switch 2, a camera 3, an industrial control computer 4, a robot 5 and a target workpiece 6, and the camera 3 is installed on one end of the conveyor belt 1. The robot 5 is installed on the other end of the conveyor belt 1, the photoelectric switch 2 is installed on the conveyor belt 1, the photoelectric switch 2, the camera 3, the industrial control computer 4 and the robot 5 are electrically connected in sequence.
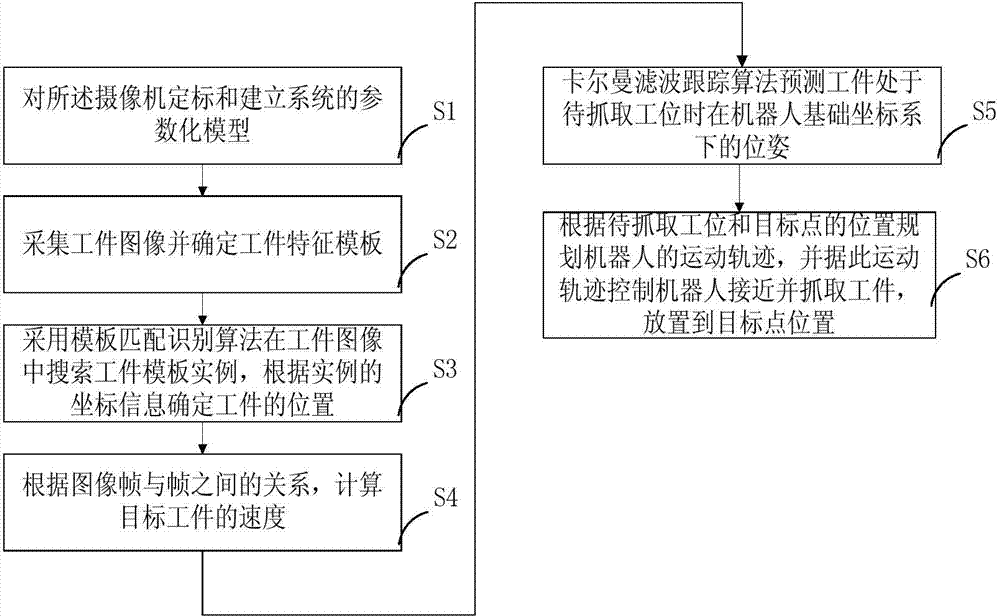
[0054] Such as figure 2 As shown, a vision-guided industrial robot workpiece positioning and grasping method includes the following steps:
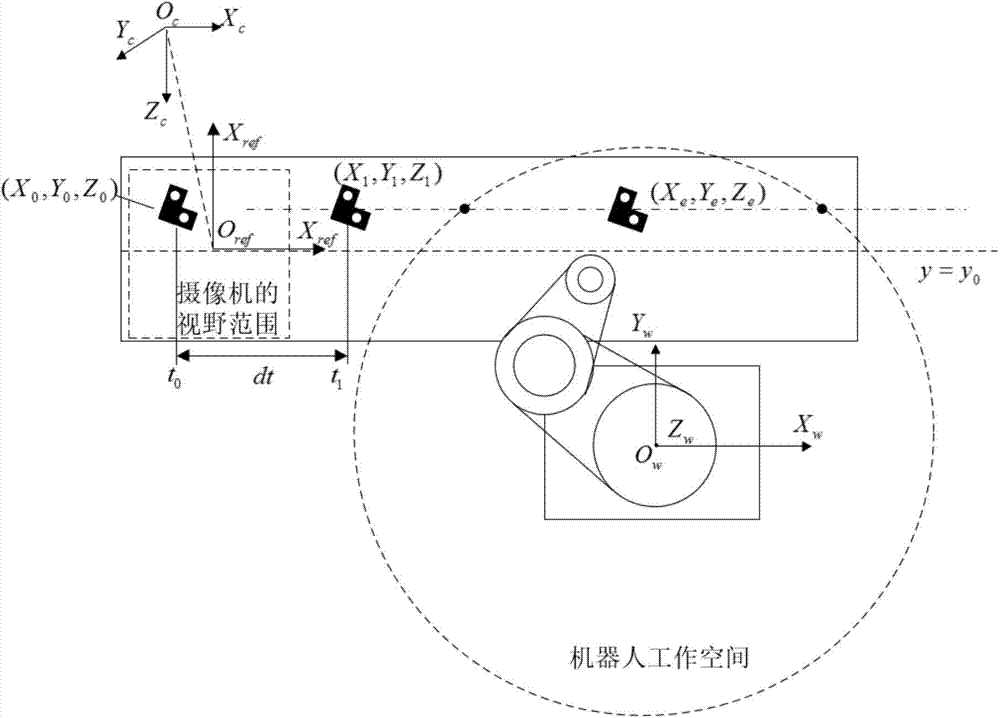
[0055] Step S1: if image 3 As shown, the camera 3 is calibrated with a plane target calibration method, and a reference coordinate system (O ref x ref Y ref Z ref ), get the relative pose between the reference coordinate system and the camera coordinate system cam h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More