Emergency parachuting device and method for multiple-rotor unmanned aerial vehicle
A multi-rotor unmanned aerial vehicle and unmanned aerial vehicle technology, which is applied in the field of agricultural unmanned aerial vehicle research, can solve the problems of reducing errors or even closing the throttle, the device is difficult to function in time, and it is difficult to effectively protect the aircraft, etc. Aircraft crash, light weight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] In the prior art, UAV parachute devices are mostly used in fixed-wing aircraft. The first type is the manual trigger type, which requires the operator to issue a command to open the parachute when it is necessary to determine the landing; the second type is the out-of-control protection type. After the device detects that the remote control signal is lost, it enters the parachute procedure. However, for multi-rotor UAVs that do not have the ability to glide, the parachute device used for fixed-wing UAVs is difficult to effectively and timely enter the parachute state to protect the aircraft in emergencies unique to multi-rotor UAVs.
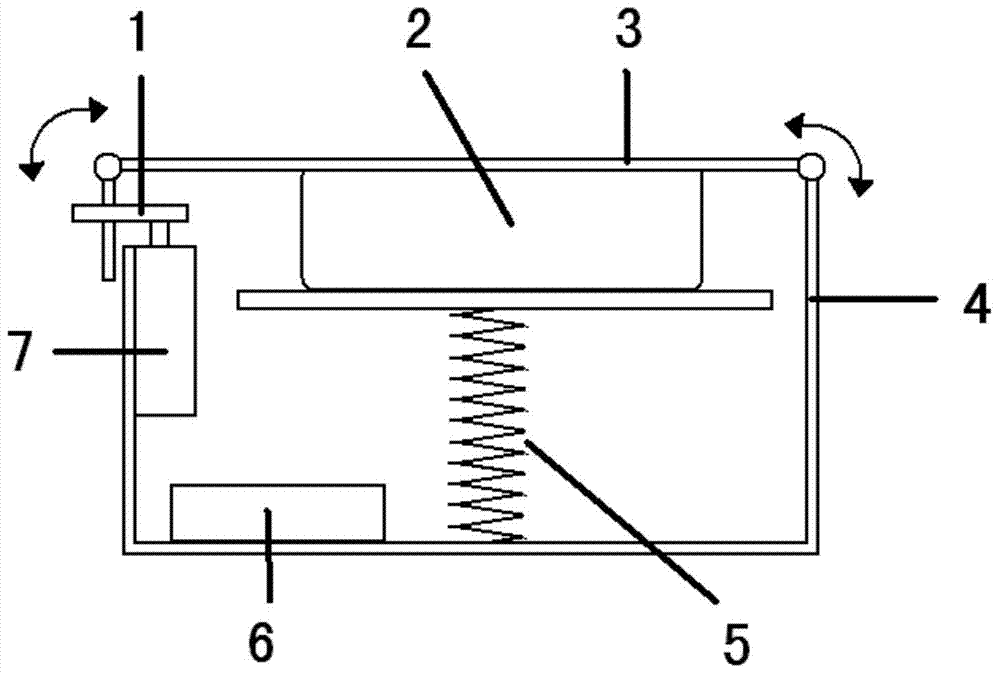
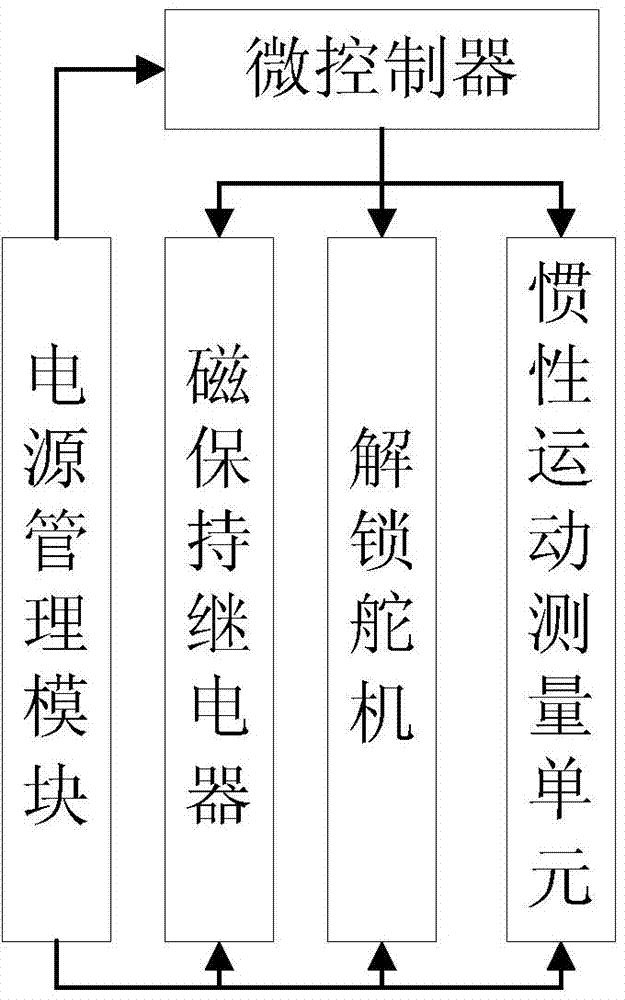
[0036] The emergency parachute device for multi-rotor UAV described in this embodiment, such as figure 1 and 2 As shown, it includes lock bolt 1, parachute 2, umbrella compartment cover 3, umbrella compartment 4, parachute throwing spring 5, measurement and control unit (including built-in lithium battery) 6, and unlocking steering gear 7...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More