

Real-time course precision detection system and method for inertial navigation system for ships
An inertial navigation system and real-time detection technology, applied to measuring devices, instruments, etc., can solve problems such as low efficiency, difficulty in high-precision measurement, and inability to fully meet the high-precision requirements of combat weapon systems, and achieve the effect of reliable data support
Inactive Publication Date: 2014-07-02
HARBIN ENG UNIV
View PDF7 Cites 13 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] It is relatively easy to measure high-precision static level and azimuth of optical fiber inertial navigation equipment on land, but it is very difficult to measure high-precision under dynamic conditions at sea
Although the current platform compass accuracy detection method adopted in the mooring navigation test process meets the relevant requirements of the national military standard and the requirements of the ship navigation test specification, but is restricted by the technical support conditions at that time, the quoted national military standard measurement method can only guarantee the heading (that is, the relative accuracy of the heading), the data collection is completely completed manually during the test, and the efficiency is low
Therefore, the current accuracy detection method cannot fully meet the high precision requirements of the combat weapon system for the true heading.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
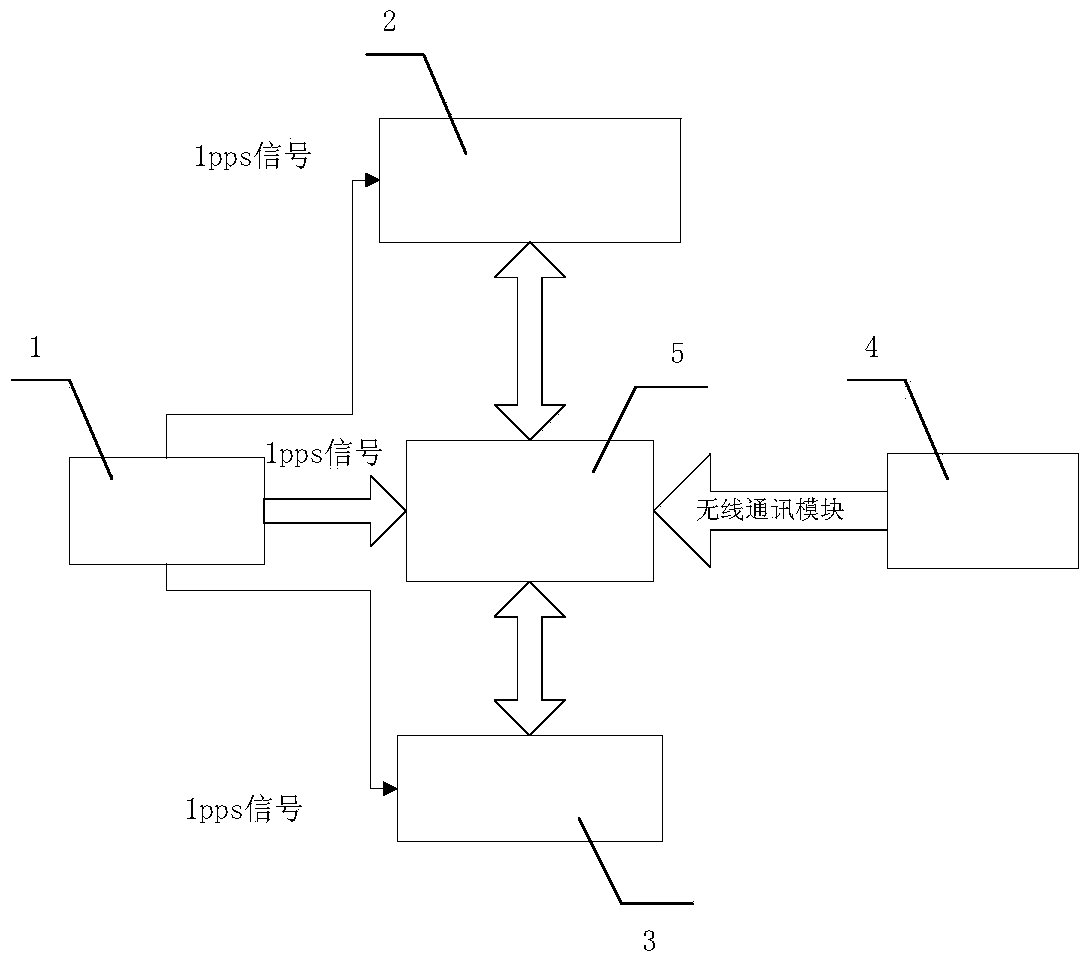
The invention provides a real-time course precision detection system and a real-time course precision detection method for an inertial navigation system for ships. The system comprises a ship differential global positioning system unit 1, an electro-optic theodolite unit 2, an attitude information interface unit 3, a target unit 4 and a data acquisition processing unit 5, wherein the ship differential global positioning system unit 1 is used for guaranteeing time synchronization and acquiring accurate position information of the electro-optic theodolite unit 2 and the target unit 4; the electro-optic theodolite unit 2 and the target unit 4 are used for measuring relative bearing of the ship; the attitude information interface unit 3 can acquire the attitude course information of the ship and calculates to obtain the course precision of inertial navigation equipment for ships through the data acquisition processing unit 5. According to the device and the method provided by the invention, real-time course precision measurement can be realized, the dynamic course precision measurement errors are reduced, and the measurement precision of the electro-optic theodolite is improved.
Description
technical field [0001] The invention relates to the field of performance detection of navigation instruments, in particular to a dynamic course accuracy detection system and detection method of marine inertial navigation equipment. Background technique [0002] Inertial navigation is based on the principle of Newton's inertia, using inertial components (gyroscopes, accelerometers) to measure the angular velocity and acceleration of the vehicle itself, and the attitude (heading angle, roll angle, pitch angle), speed and position are obtained through integration and calculation , so as to achieve the purpose of vehicle attitude determination and navigation positioning. The equipment that makes up the inertial navigation system is installed in the carrier. The work does not depend on external information, does not radiate energy to the outside world, and is not easily disturbed. It is an autonomous navigation system. [0003] After the inertial navigation equipment is installe...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G01C25/00
CPCG01C25/005
Inventor何昆鹏韩继韬陈熙源张兴智李荣梁海波张晓宇王晓雪王晨阳于鑫彪
OwnerHARBIN ENG UNIV