

Leveling control system and method of land leveller scraper
A control system, a technology for leveling shovels, applied in the safety of fluid pressure actuation systems, fluid pressure actuation system components, mechanical equipment, etc., can solve the problems of ineffective use of energy, large system power loss, and low control flow, etc. Achieve the effect of efficient energy, small power loss and reduced machine wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Hereinafter, the present invention will be further described in detail with reference to the examples and drawings, but the implementation of the present invention is not limited thereto.
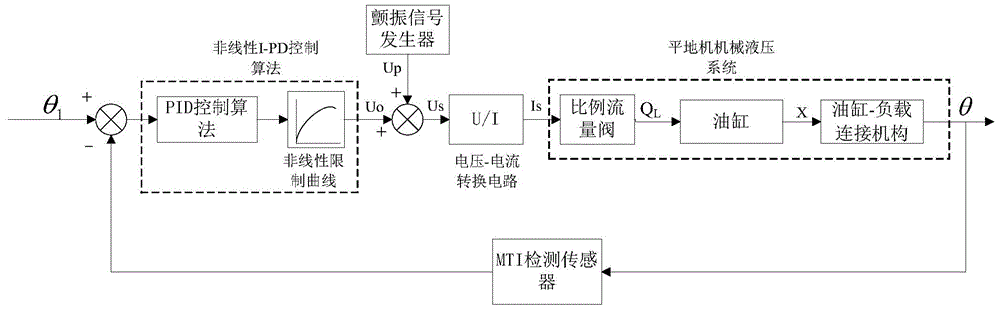
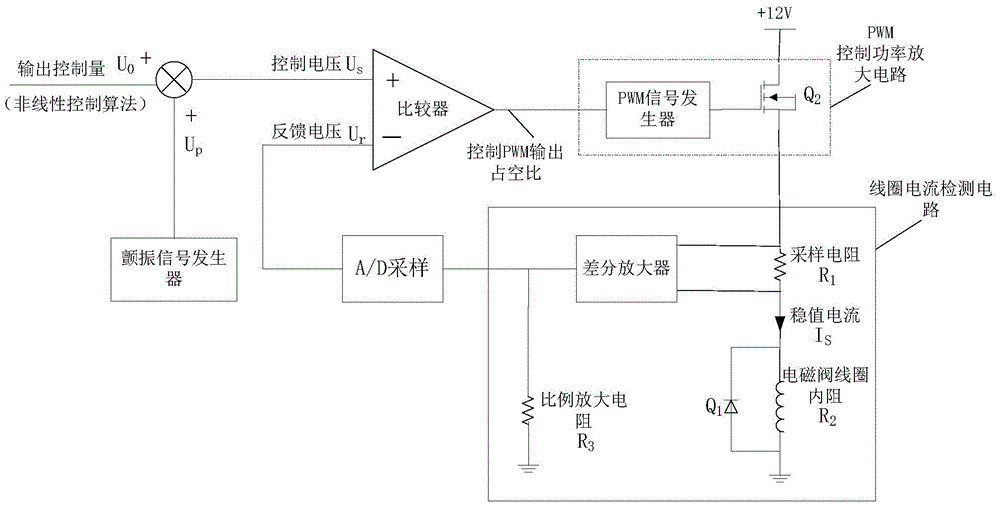
[0054] Such as figure 1 , 2 3. A leveling control system for a grader leveling shovel, including an O-type proportional solenoid directional valve, a hydraulic system, and a detection sensor, a microcontroller, a flutter signal generator, and a proportional flow valve drive circuit connected in sequence ,among them
[0055] The detection sensor detects the real-time horizontal inclination angle θ of the shovel, and transmits the horizontal inclination θ to the microcontroller for processing; the detection sensor is an MTI detection sensor, which is installed on the shaft of the shovel;
[0056] The microcontroller first calculates the angular velocity reference value ω from the horizontal inclination angle θ of the shovel through the I-PD control algorithm, and then sends ω into the nonlin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More