

A walking pattern recognition method for exoskeleton based on electromyographic signals
A technology of electromyographic signals and walking patterns, applied in character and pattern recognition, instruments, computer parts, etc., can solve the problems of increasing the difficulty of information collection, not mentioning common road condition information recognition, and being unfavorable for technology promotion and application, etc., to achieve The method is reliable and practical, the recognition time is short, the effect of real-time and safety assurance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
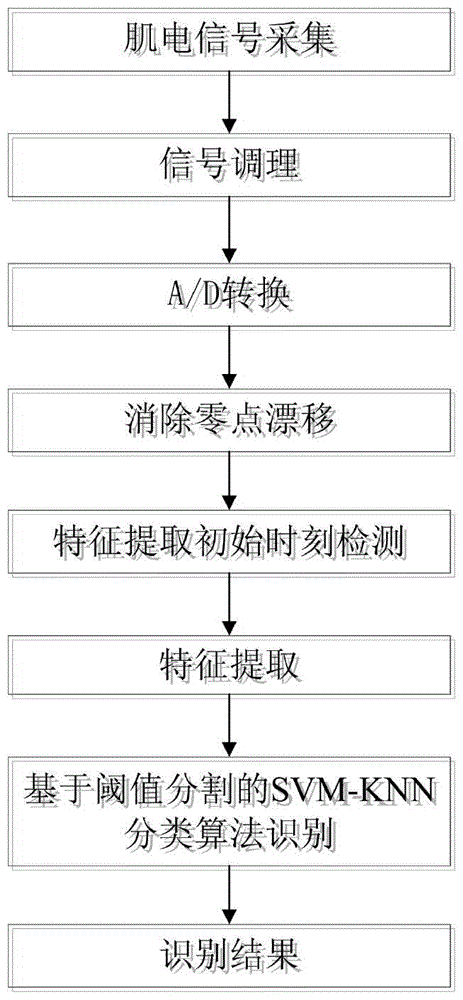
Method used
Image

Examples
Embodiment
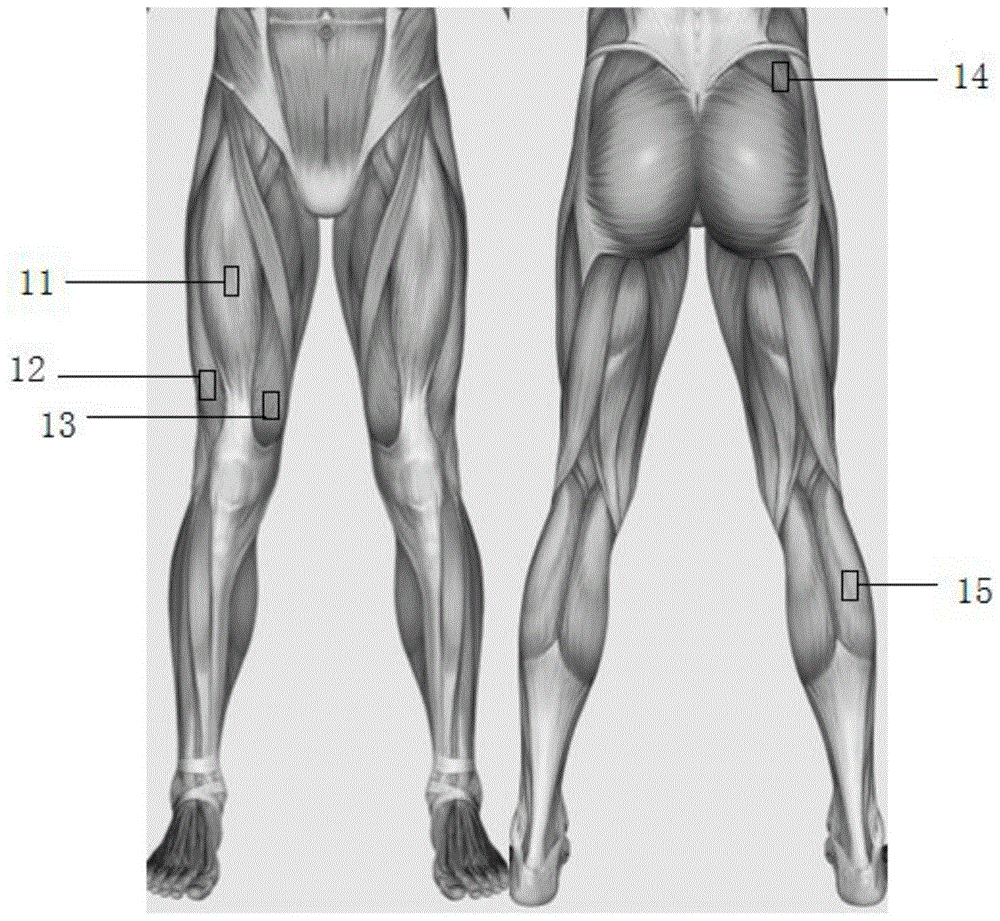
[0085] The model of the EMG signal sensor used in this embodiment is MyoScan, and the EMG electrode used is a one-time-use three-point differential input EMG electrode with non-drying conductive gel. It is matched with the MyoScan EMG signal sensor. The model is MSP430F2274. One end of the electromyography signal sensor is connected to the electromyography electrode through the electrode button, and the other end is connected to the single-chip microcomputer fixed on the exoskeleton through a wire.
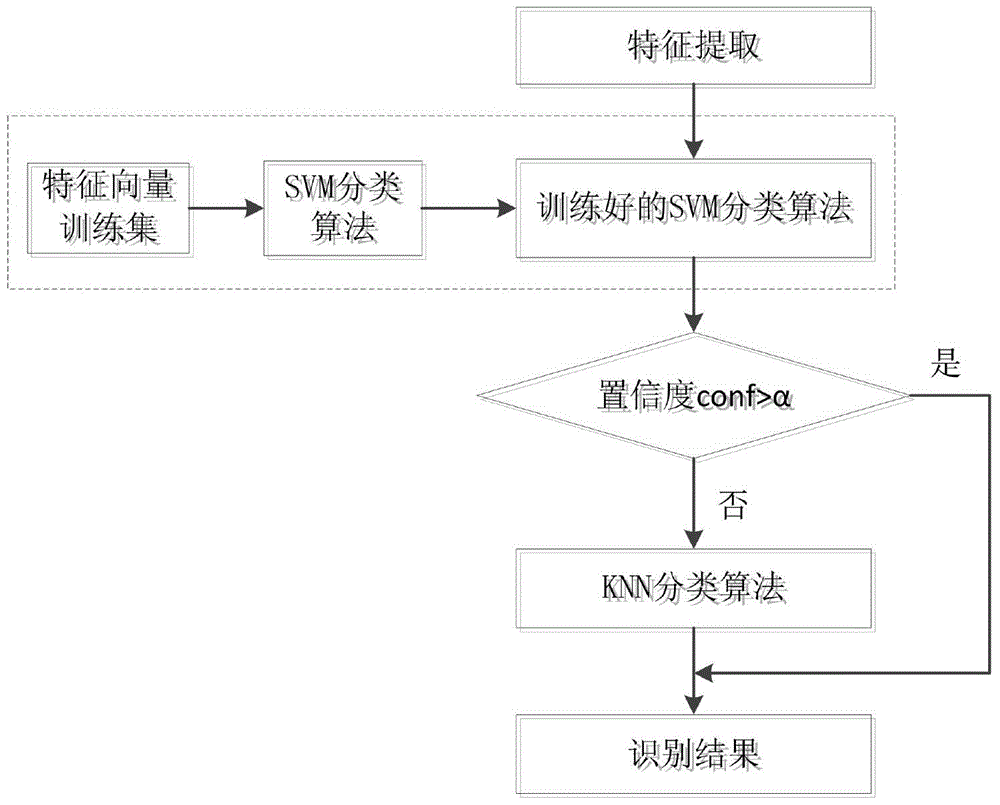
[0086] In the present invention, the value of M is determined to be 50ms, and the value of N is determined to be 4. The selection of the confidence threshold α is greatly affected by different individuals and varies from person to person. In this embodiment, the confidence threshold is determined by conducting multiple experiments on the data of the tested person α=0.65. Among them, the KNN classification algorithm mainly relies on the surrounding limited nearby samples when making ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More