

Weak coupling three horizontal moving parallel robot mechanism
A three-translation and weak-coupling technology, which is applied in the direction of manipulators, program-controlled manipulators, and manufacturing tools, can solve problems such as difficult to guarantee manufacturing accuracy, difficult kinematics positive solutions, and small working space, so as to achieve easy manufacturing accuracy and positive and negative kinematics. The effect of easy solution and low assembly requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be noted that the embodiments are illustrative, not restrictive, and cannot limit the protection scope of the present invention.
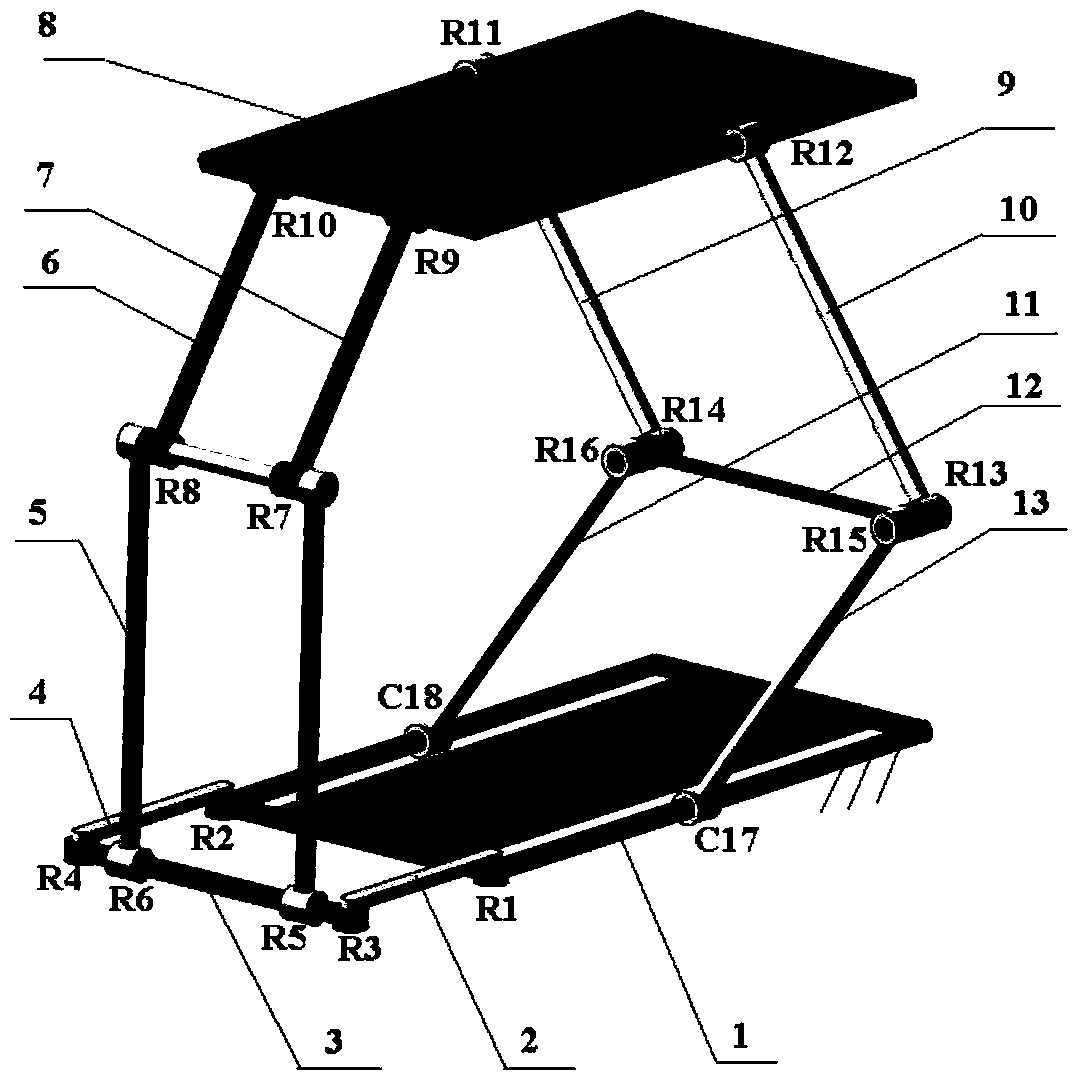
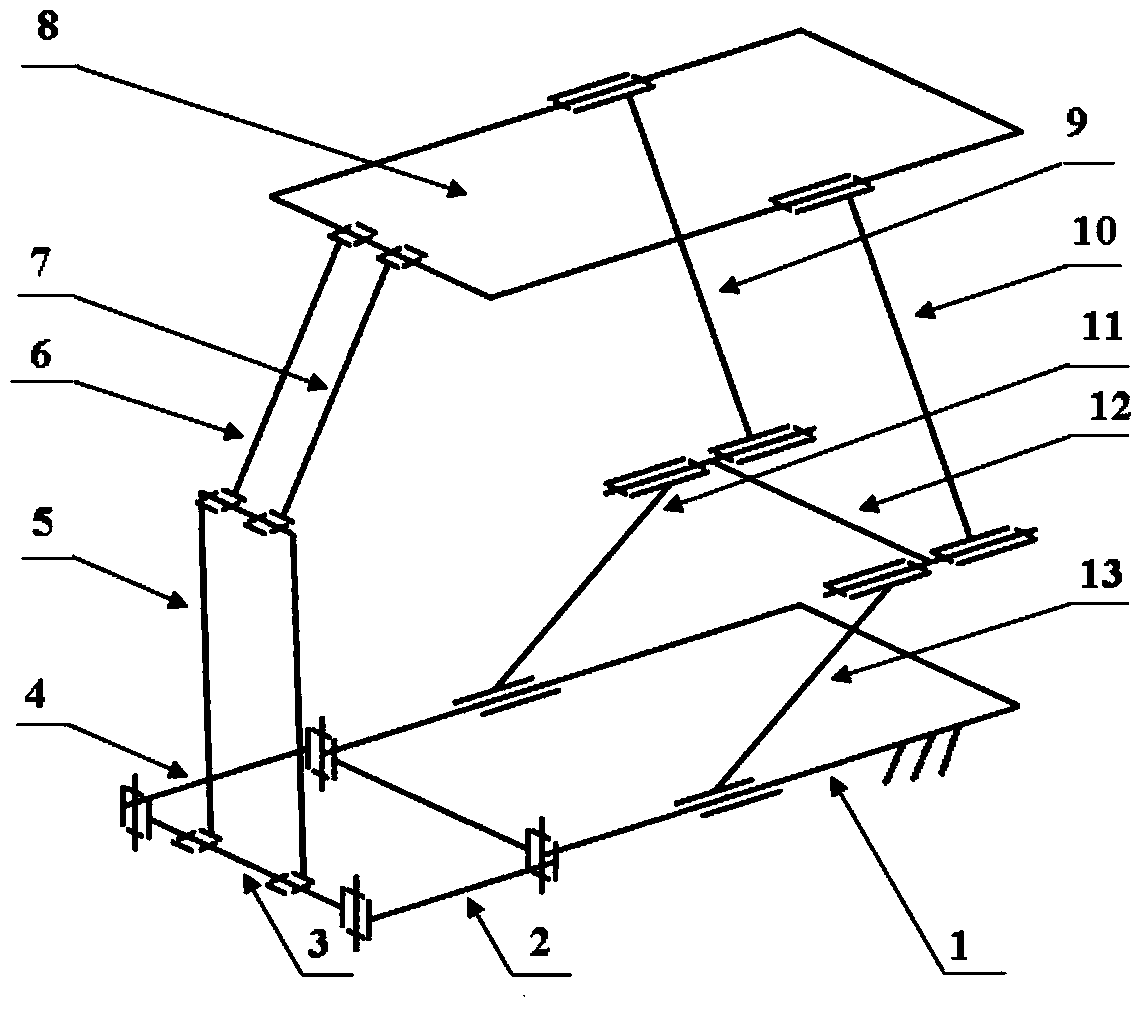
[0017] A weakly coupled three-translation parallel robot mechanism is composed of a static platform (1), a dynamic platform (8) and two generalized branch chains. It includes two angle drive hinges R2 and C17, and one linear drive pair C18.
[0018] The static platform (1) of the first generalized branch chain is connected to one end of the connecting rod two (2) and the connecting rod four (4) through the rotating pairs R1 and R2 respectively, and the other end of the connecting rod two (2) is rotated The pair R3 is connected with one end of the connecting rod three (3), and the other end of the connecting rod three (3) is connected with the connecting rod four (4) through the rotating pair R4, forming a parall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More