

Multi-combination push type flexible bionic robotic fish
A robotic fish and propulsion technology, which is applied in the direction of ship propulsion, propulsion components, propulsion transmission devices, etc., can solve the problems of single propulsion mode and complex structure of bionic fish, and achieve the effect of simple structure, high energy density and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0025] Such as Figure 1-4 shown.
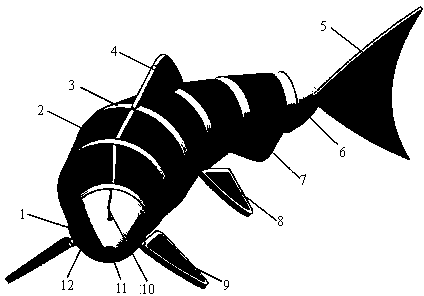
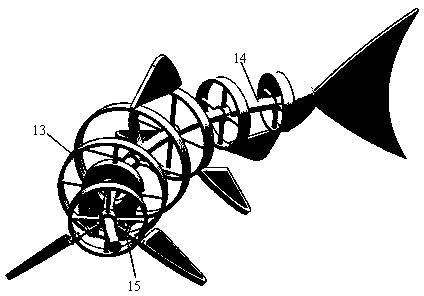
[0026] A multi-combination propulsion type flexible bionic robot fish, which is mainly composed of a fish head 1, a fish body, a fish tail 6 and various fish fins, such as figure 1 As shown, the fish head 1 is composed of a fish body artificial muscle 2 with flexible electrodes, a flexible skeleton 3 and a flexible shaft 14, as figure 2 shown. Flexible shaft 14 and some annular frame shapes (similar automobile steering wheel structure, such as figure 2 ) The flexible skeleton 3 constitutes the robotic fish skeleton structure 13 of the present invention. The fish body artificial muscles 2 are symmetrically distributed on both sides of the flexible skeleton 3 and installed between two adjacent ring-shaped flexible skeletons 3 in a tensioned state. The fish body artificial muscle 2 is a dielectric type electroa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More