

Train braking hardware-in-the-loop simulation testing stand and method
A semi-physical simulation and test bench technology, applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of huge cost, can not fully consider the complexity of the brake machine and strong nonlinearity, and achieve the cost of the test. The effect of reducing, saving personnel, and accurate test results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but should not be used to limit the scope of the present invention.
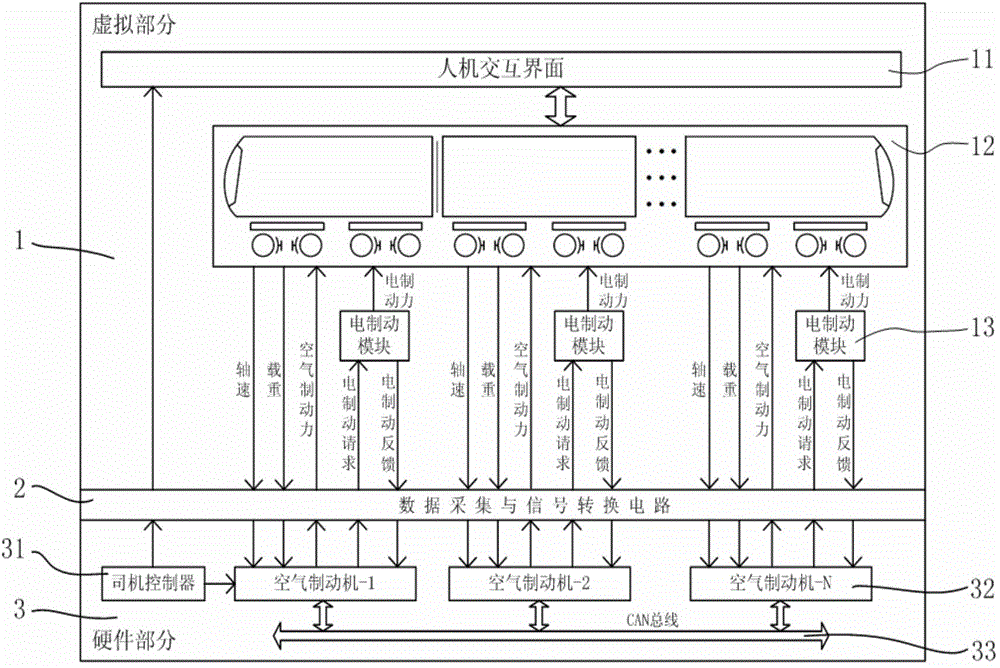
[0030] Such as figure 1 As shown, the train brake hardware-in-the-loop simulation test-bed of the present embodiment comprises: test-bed virtual part 1, test-bed hardware part 3 and data acquisition and signal conversion circuit 2; by air brake as test-bed hardware part 3, The test bench can fully consider the structural complexity and strong nonlinearity of the air brake, and provide the air removal system required for the train brake test through the virtual train, virtual train operating environment and virtual electric braking force of the virtual part 1 of the test bench. Test conditions other than motive hardware.
[0031] The virtual part 1 of the test bench is carried on the computer ter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More