

Underwater navigation and positioning method capable of combining terrain and environment characteristics
An environmental feature, navigation and positioning technology, applied in navigation, mapping and navigation, navigation calculation tools, etc., can solve the problems of reducing the position error of the main inertial navigation system, the amount of terrain information is not rich, and the terrain-assisted navigation system cannot be used. The effect of correcting position errors, good autonomy and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
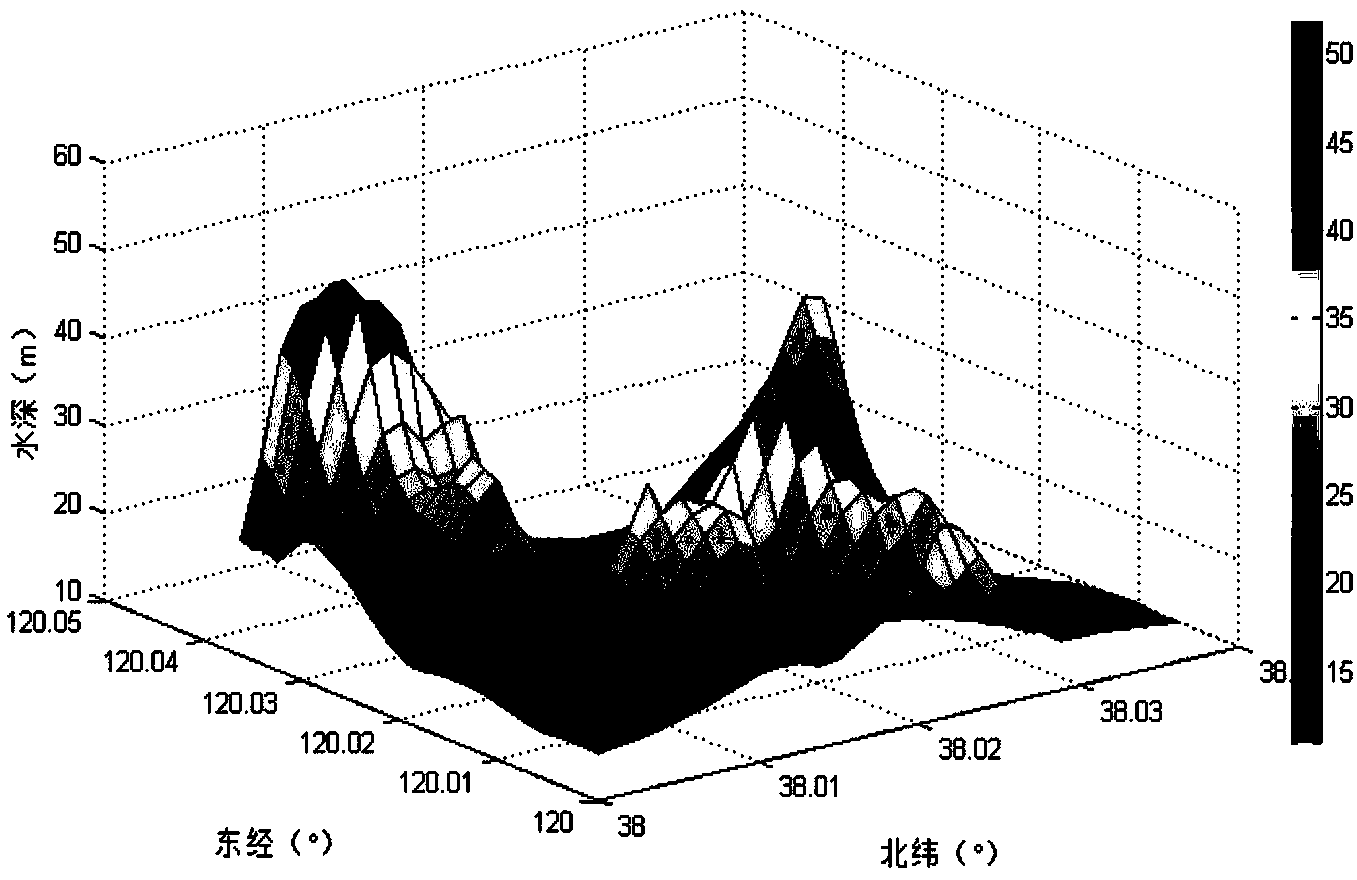
[0235] The simulation experiments are selected as image 3 The terrain area shown is a rectangular area from (38.0° north latitude, 120.0° east longitude) to (38.04° north latitude, 120.05° east longitude). According to the moving calculation window method, the following is obtained through simulation analysis Figure 4 The box-shaped area on the left is the terrain-matching area, and the box-shaped area on the right is the terrain-mismatching area.
[0236] Set an ideal navigation path containing 10 points in the terrain matching area, such as Figure 5 1# line in the middle, the track indicated by inertial navigation is as follows Figure 5 In the 2# line, the matching track after using the ICCP algorithm for matching and positioning is as follows: Figure 5 As shown in line 3# in the middle, it can be seen that the matching track almost coincides with the ideal track.
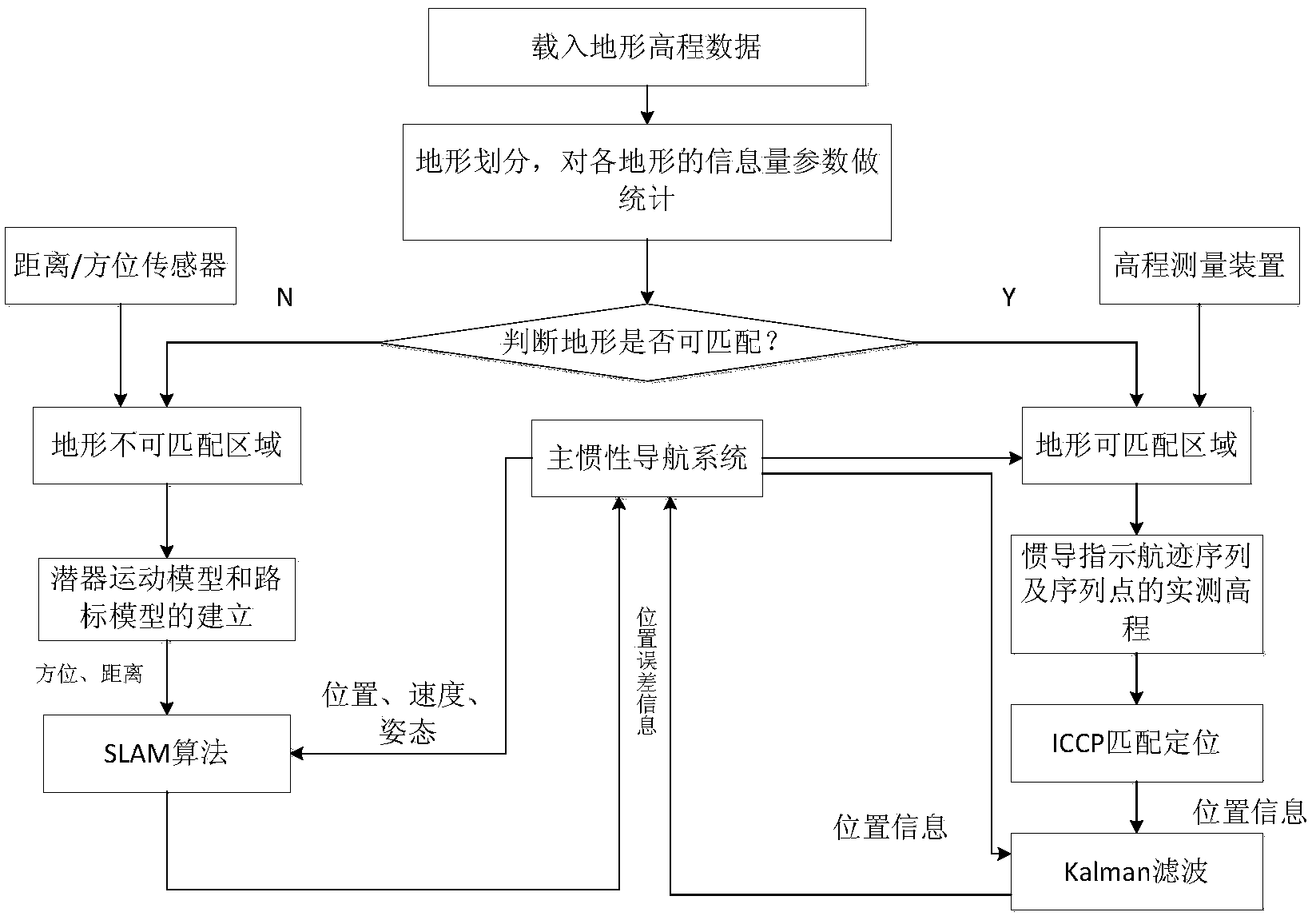
[0237] In areas where the terrain cannot match, the SLAM algorithm is used for navigation and position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More