

Seven-functional underwater mechanical arm system
A technology of mechanical arm and functional water, which is applied in the direction of manipulators, underwater operation equipment, ships, etc. It can solve the problem that the stability of the gripper is not very high, there is no mature and stable mechanical gripper technology, and the resistance to accidental impact is poor. and other problems, to achieve the effect of compact structure, simple and compact structure, and the difficulty of waterproofing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention is described in more detail below in conjunction with accompanying drawing example:
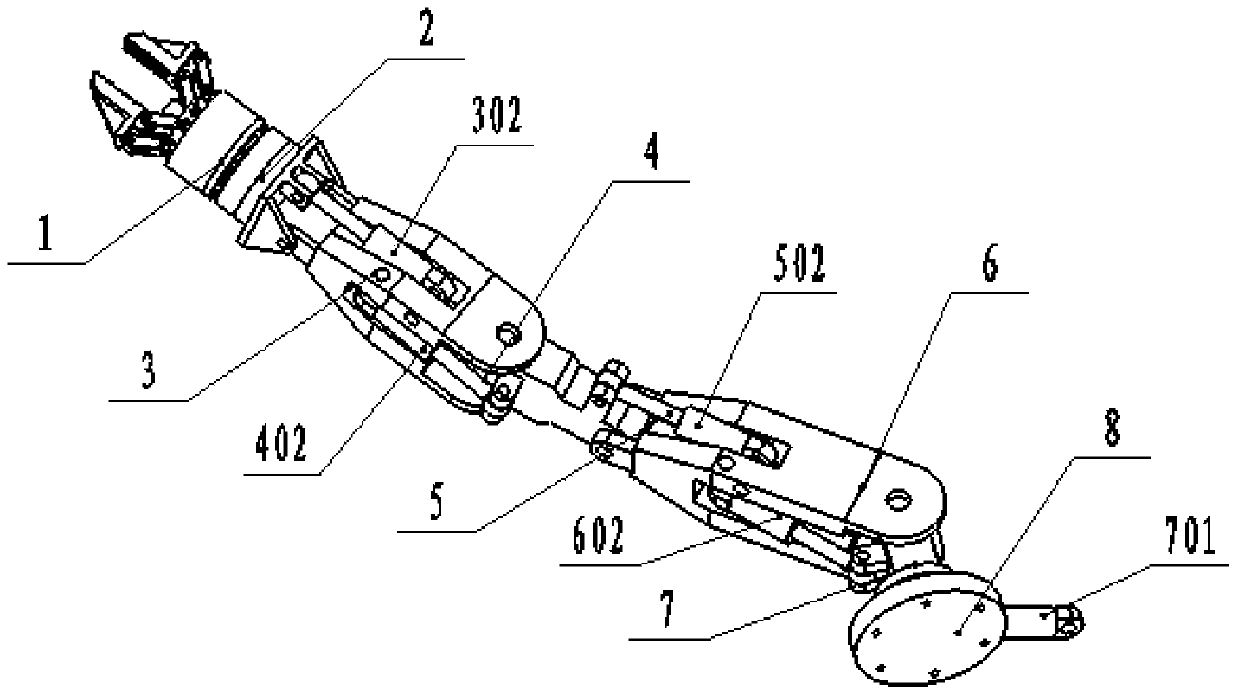
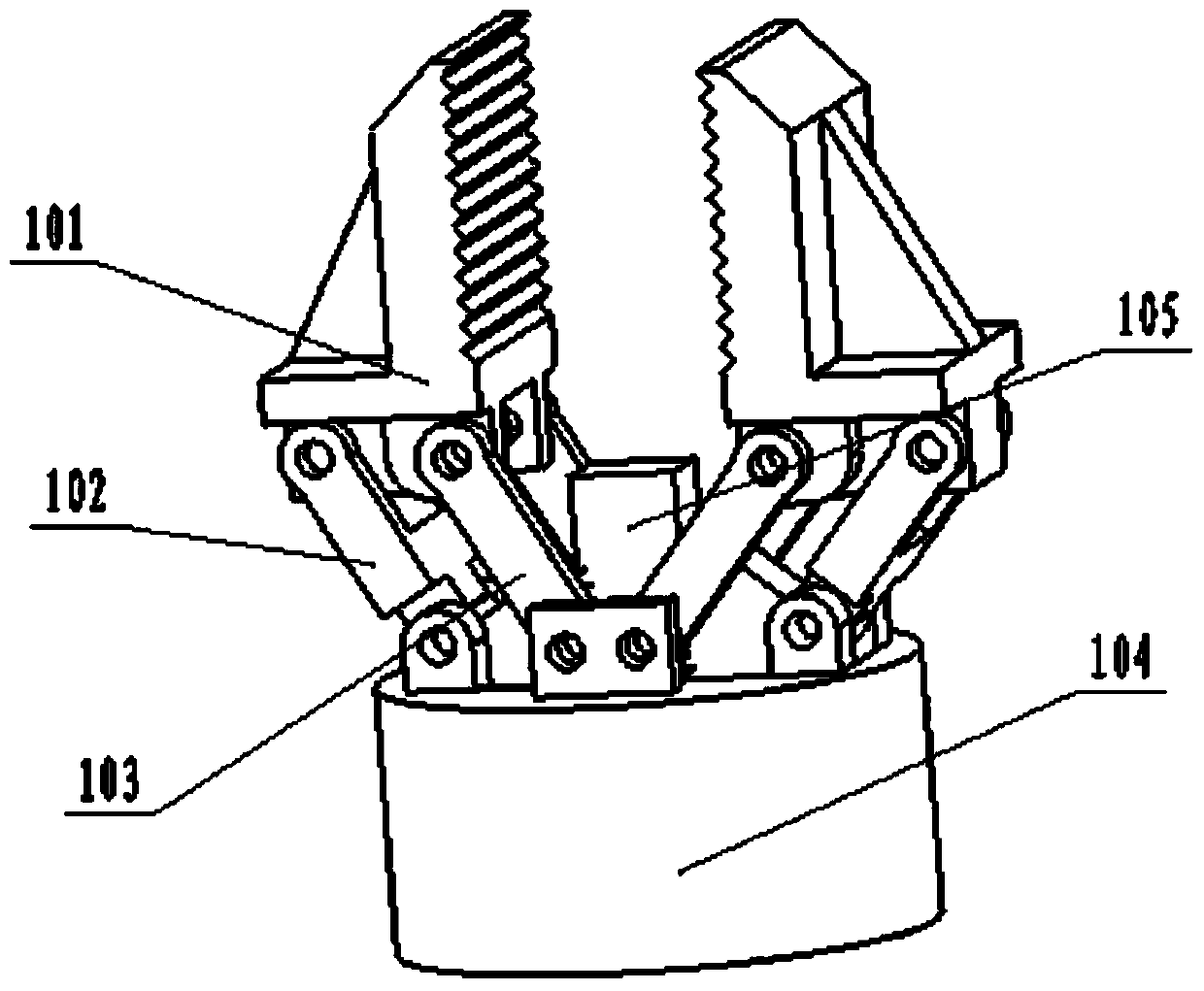
[0030] combine Figure 1-18 , the base 8 and the hydraulic cylinder 701 are fixed on the working body of the mechanical arm system. Here, the servo valve of the hydraulic cylinder 701 is controlled by the control signal, and then the oil volume in the hydraulic cylinder 701 is determined, and the joint is pushed by the single output rod of the hydraulic cylinder 701. The connecting rod 601 of 26 realizes the rotary motion of the joint 26; the control signal of the joint 35 acts on the servo valve of the hydraulic cylinder 602, thereby controlling the amount of oil in it, and through the promotion of its single rod and the pin shaft with the connecting rod 601, Realize the swing motion of the joint 35 around the pin shaft; the joint 44 acts on the servo valve of the hydraulic cylinder 502 by the control signal, thereby controlling the amount of oil in it, and throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More