

Crawler crane and control system and method for get-off assembly and disassembly
A control method and technology of a control system, which are applied to cranes, transportation and packaging, load hoisting components, etc., can solve the problems of insufficient safety guarantee, unbalanced center of gravity when getting off the vehicle, and difficulty in operation for beginners, so as to meet the stress requirements, The effect of reducing labor intensity and reducing operation difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
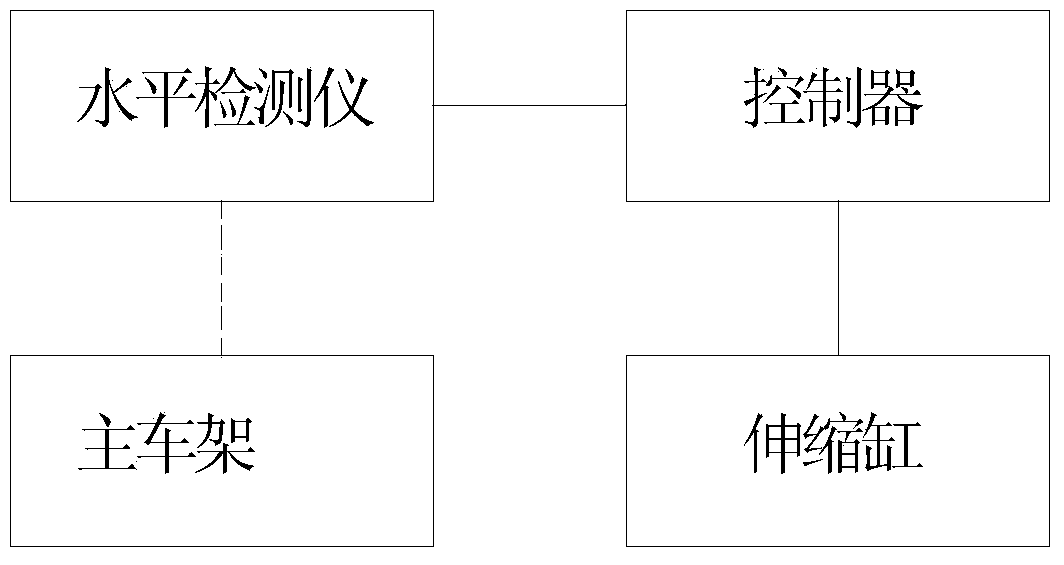
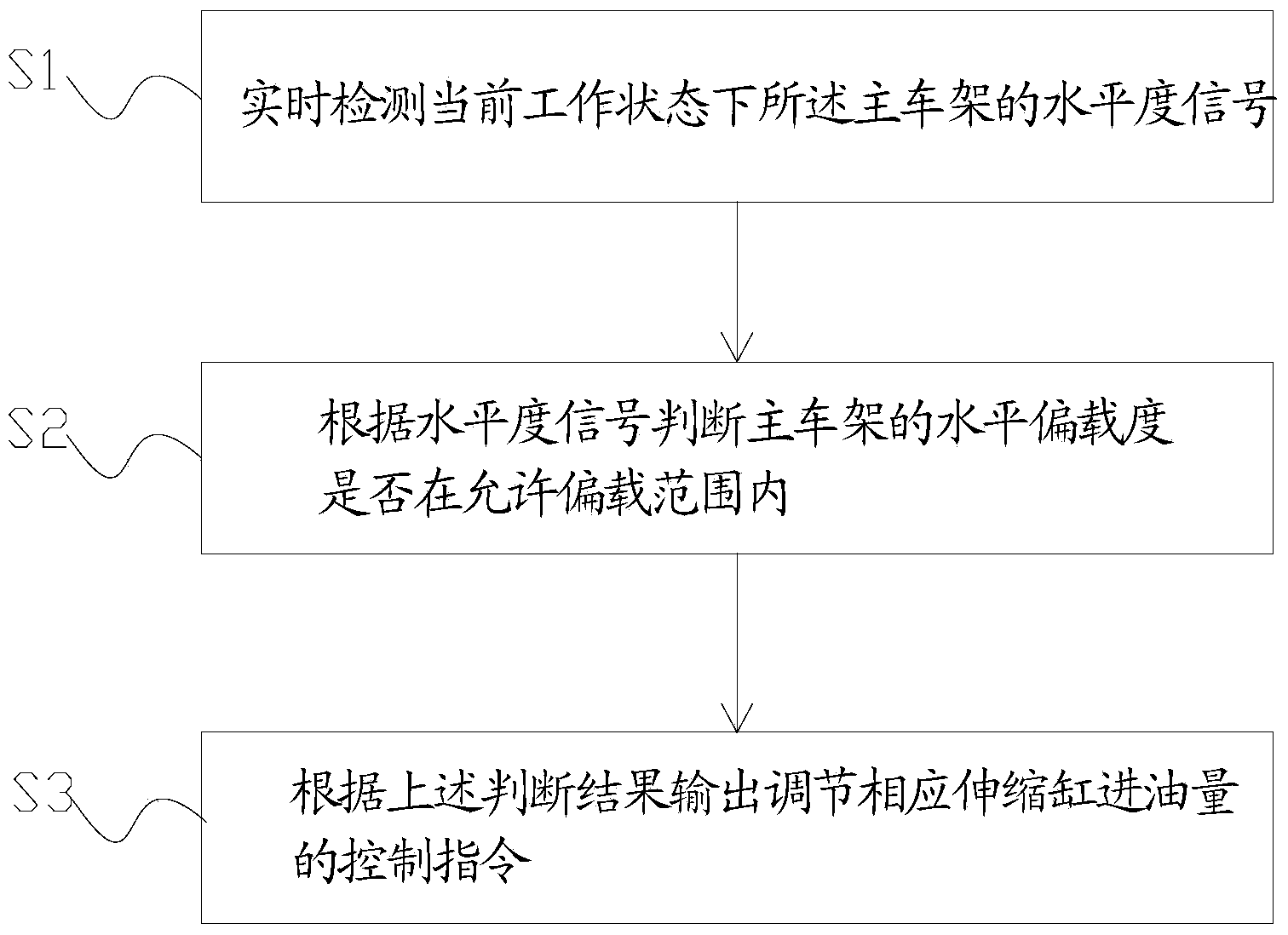
[0032] The core of the present invention is to provide a control method for getting off the vehicle, which can realize the stable jacking or falling of the main frame and ensure the safety of getting off the vehicle. Another core of the present invention is to provide a crawler crane and a control system for dismounting.
[0033] Without loss of generality, this article takes the application of the control system on crawler cranes as an example to introduce the technical effects. Those skilled in the art should understand that the application of the control system described in this article to other construction machinery is also within the protection scope of this article within.
[0034] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0035] Please refer to figure 1 , fig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More