

Intelligent integration method for anti-integral windup and overshoot suppression of PID (Proportional, Integral and Derivative) control system
A technology of control system and integration method, applied in the field of intelligent integration, can solve the problems of complex parameter determination, achieve the effect of simple tuning, improved dynamic response performance, and clear physical meaning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the purpose, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
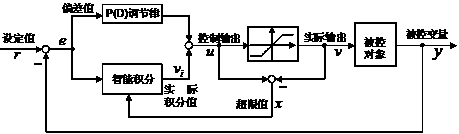
[0039] Such as figure 1 Shown is the structural diagram of the anti-saturation overshoot intelligent integral method PID control system of the present invention. Among them, the output of the anti-saturation overshoot intelligent integral method PID controller is the control signal u ( t ), used to control the controlled object, r ( t ) is the system setting input, y ( t ) is the output of the system, e ( t ) is the deviation signal, v ( t ) is the actual output signal of the actuator, x ( t) is the actuator overrun signal.
[0040] The key point of the present invention i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More