

Unmanned aerial vehicle real-time simulation system and developing method thereof
A real-time simulation, UAV technology, applied in general control systems, control/regulation systems, instruments, etc., can solve the problem of high complexity of simulation systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
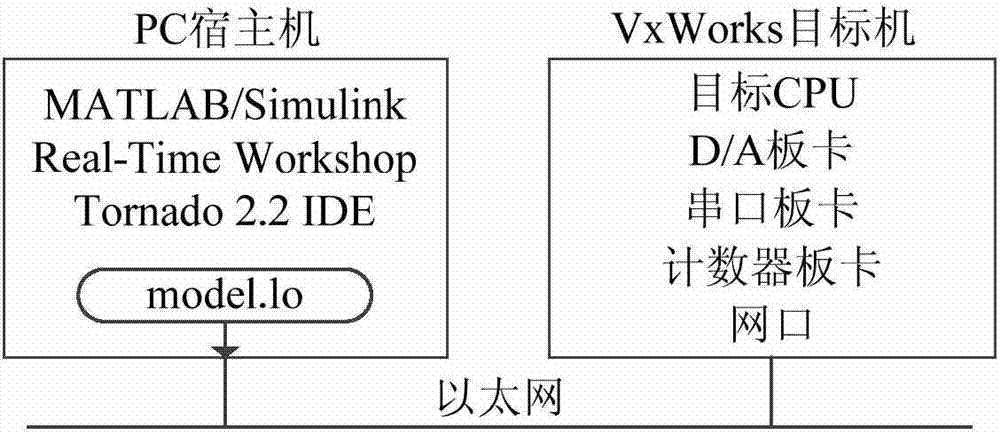
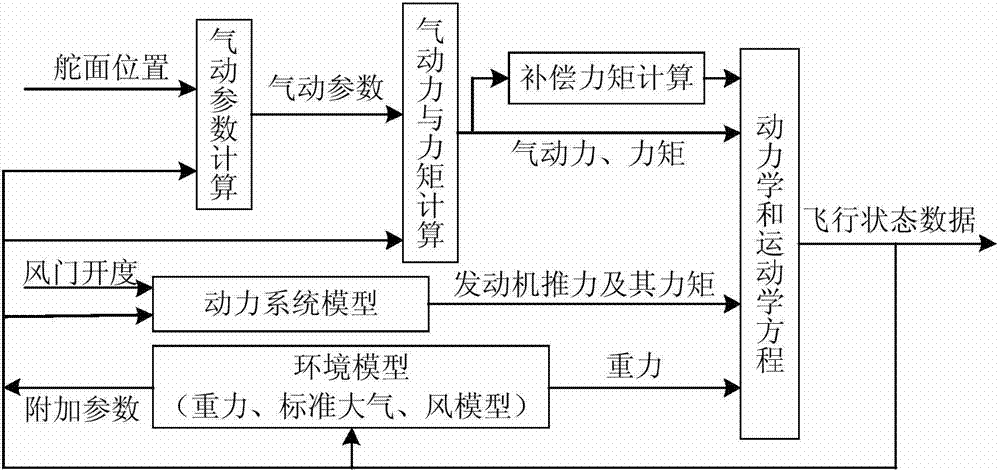
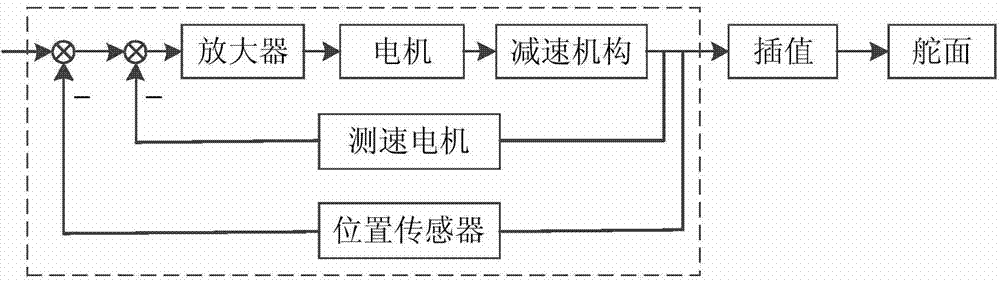
[0048] A real-time simulation system for an unmanned aerial vehicle, including a control system, an actuator, an unmanned aerial vehicle dynamics model, a sensor model, an auxiliary module, a communication module, and an interface conversion module; the actuator includes an environment model and a steering gear model, and the auxiliary module includes The host computer display interface; the interface conversion module includes a first interface conversion module and a second interface conversion module; the control system output control signal is converted into an input signal of the execution structure through the first interface conversion module, and the execution agency receives the processed The control signal of the control signal completes the dynamic characteristic simulation, and outputs the damper information of the environment model and the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More