

Gait planning method for walking of biped robot along slope
A biped robot and gait planning technology, applied in the field of robotics, can solve problems such as lack of support period for both feet, uncoordinated left and right leg movements, and unnatural gait
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
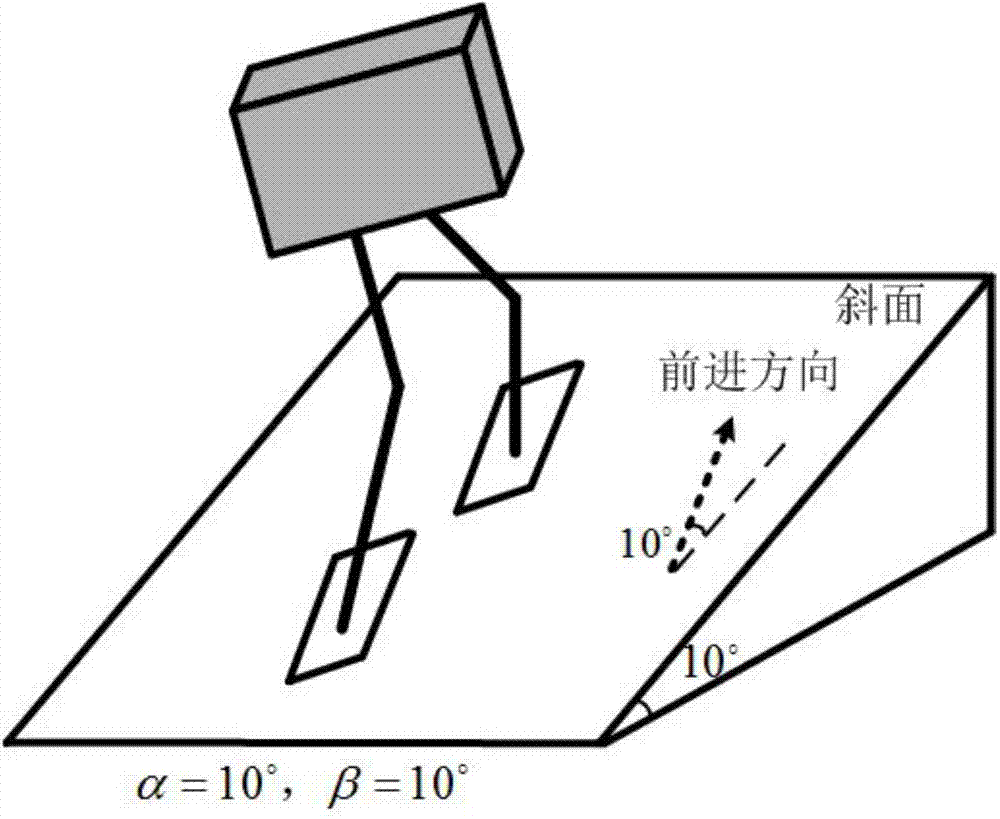
[0094] Specific embodiment 1 is to utilize the method of the present invention to realize that biped robot walks along a 10° inclined plane, and becomes 10° direction (α=10°, β=10°) with the maximum gradient direction, figure 1 It is the schematic diagram of specific embodiment 1.
specific Embodiment 2
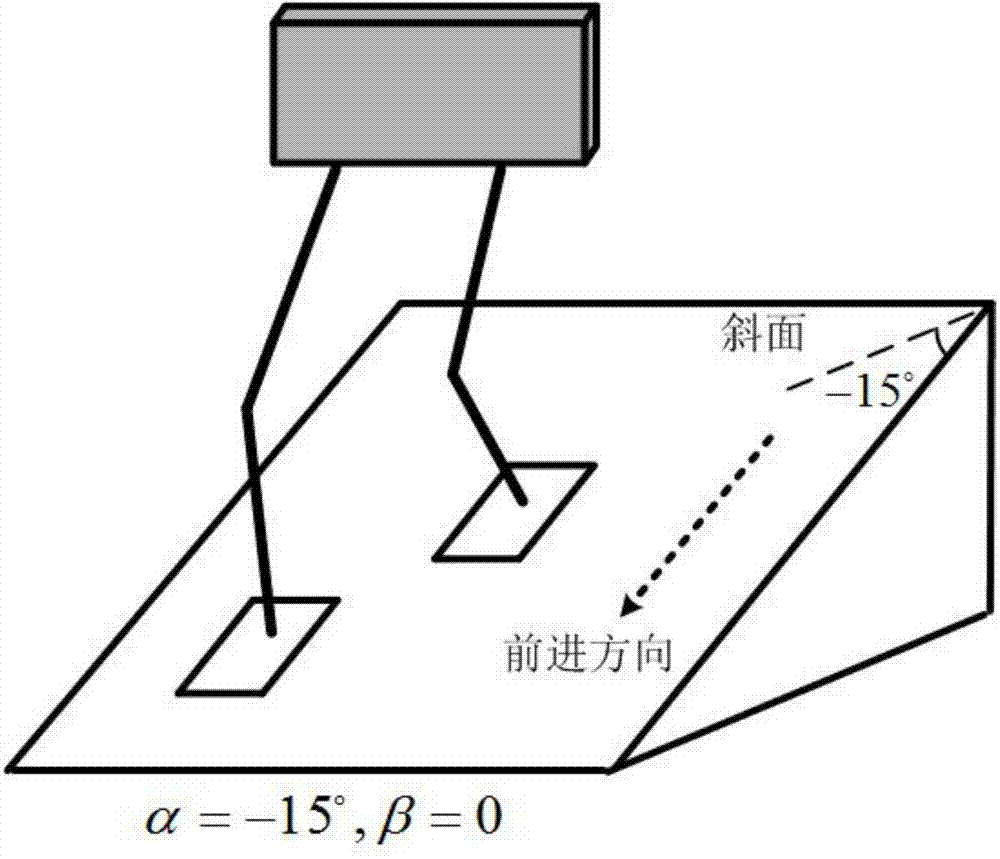
[0095] Specific embodiment 2 is to utilize the method of the present invention to realize that biped robot walks in a straight line along the minimum gradient direction (α=-15°, β=0) of the slope of -15 °, figure 2 It is the schematic diagram of specific embodiment 2.
specific Embodiment 3
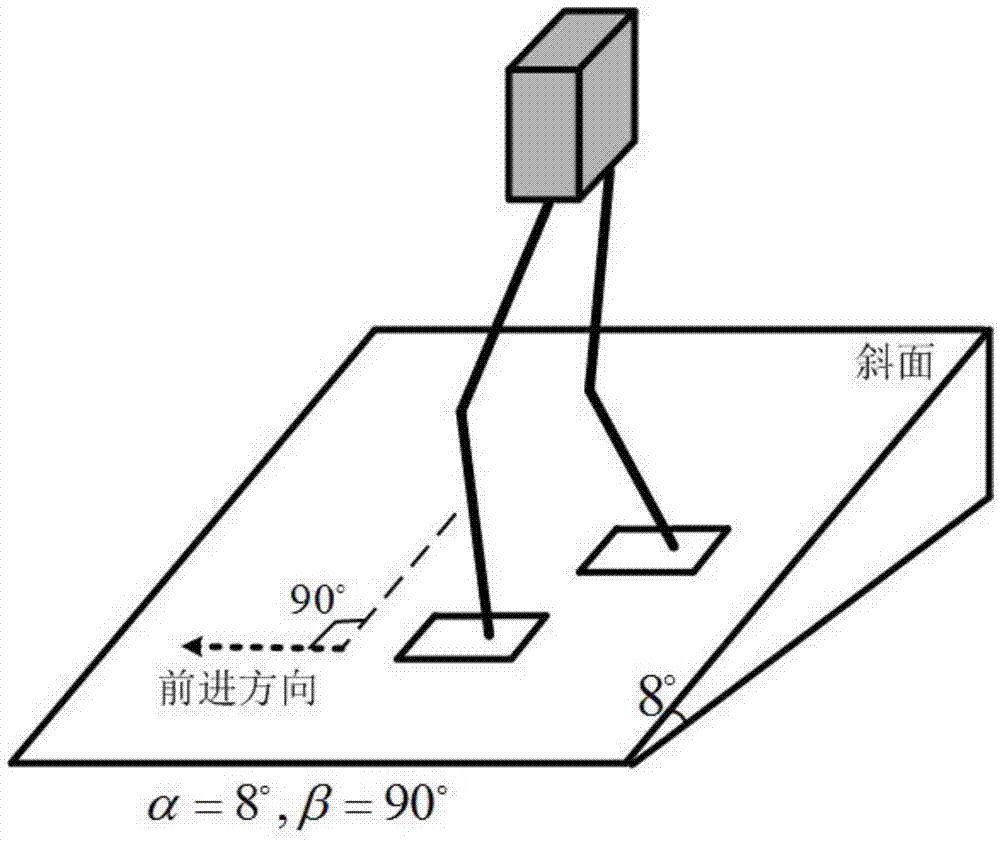
[0096] Specific embodiment 3 is to utilize the method of the present invention to realize that the biped robot walks straight along the direction (α=8°, β=90°) that the slope gradient of 8° is 0, image 3 It is the schematic diagram of specific embodiment 3.
[0097] The specific embodiment 2 and the specific embodiment 3 are special cases of the specific embodiment 1. The process of bipedal walking gait planning of the three is basically the same, and the difference is only in the relevant parameters of the gait planning. Therefore, the following specific implementation mode only introduces the specific embodiment 1.
[0098] The biped robot used in the embodiment of the present invention has 2 legs and 1 upper body trunk, each leg has 6 degrees of freedom, including 3 hip joints, 1 knee joint, and 2 ankle joints; The middle and upper torso keeps translation in a straight line, and the feet also keep translation during the stepping process, and the center of mass is approxim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More