

Posture identification method and device based on near-infrared TOF camera depth information
A TOF camera and gesture recognition technology, which is applied in character and pattern recognition, computer components, image data processing, etc., can solve the problem of being easily affected by illumination changes and complex backgrounds, inconvenient real-time embedded transplantation, and inaccurate target segmentation To achieve the effect of facilitating real-time embedded transplantation, improving recognition efficiency, reducing difficulty and algorithm complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
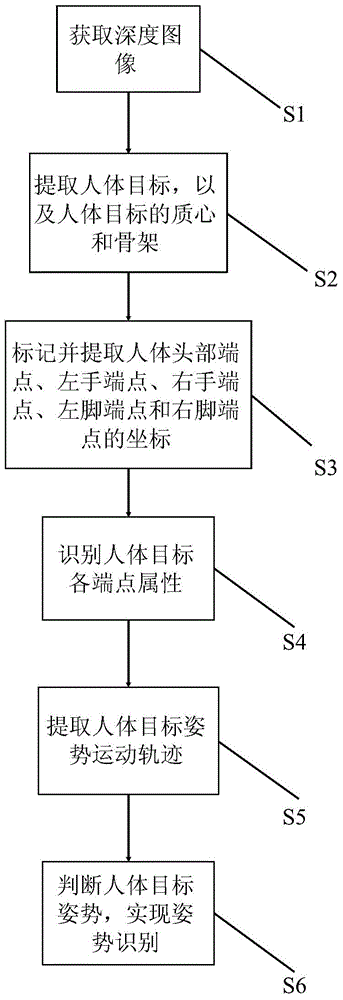
[0058] Please also see Figure 1 to Figure 6 , the present invention provides a kind of posture recognition method based on near-infrared TOF camera depth information, and it comprises the following steps:
[0059] S1: Get a depth image. In this embodiment, the depth image is acquired by a near-infrared TOF camera SR4000.
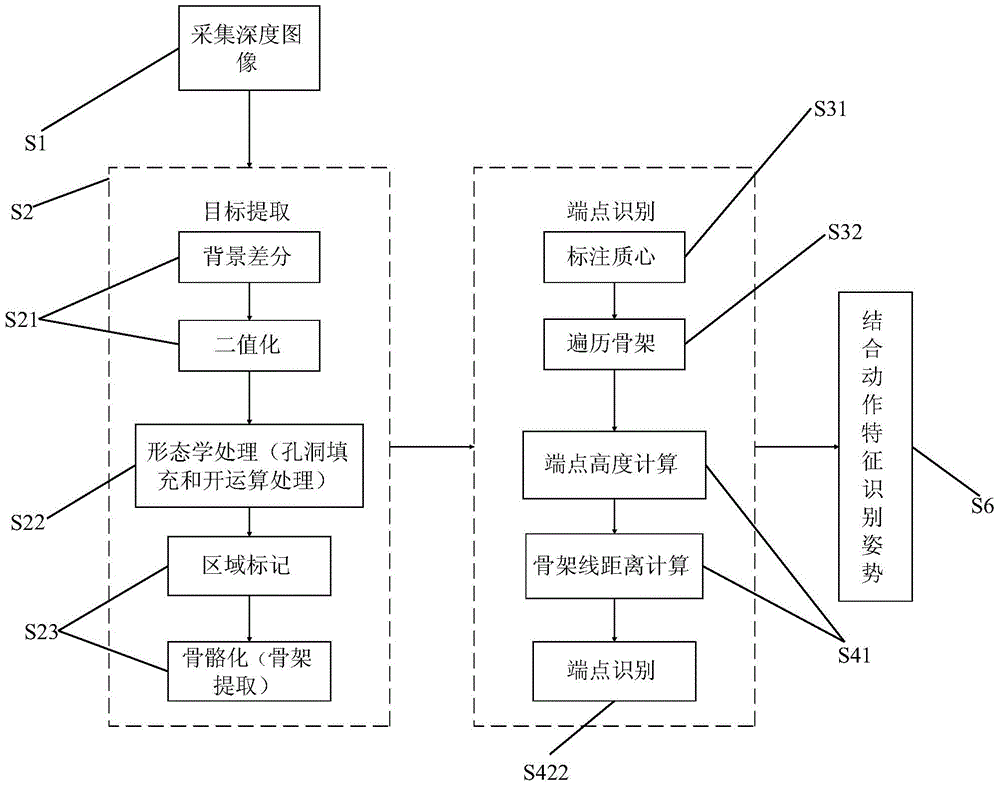
[0060] S2: Extract the human target from the depth image, as well as the centroid and skeleton of the human target. Specifically, the following steps are included:
[0061] S21: sequentially perform background difference processing and image binarization processing on the depth image to obtain a target binary image;
[0062] S22: Perform hole filling, opening operation processing, and connected domain marking on the target binary image in sequence to obtain the centroid of the connected domain;
[0063] S23: performing zhang fast parallel thinning operation on the target binary image to realize the extraction of the human target skeleton and its coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More