

Neural network control-based reload robot position controller
A neural network control and neural network technology, which is applied in the field of heavy-duty robot position controllers, can solve the problems that the single-input and single-output linear control method cannot meet the application requirements, and achieve the simplification of learning rules, ensure the convergence speed, and improve performance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
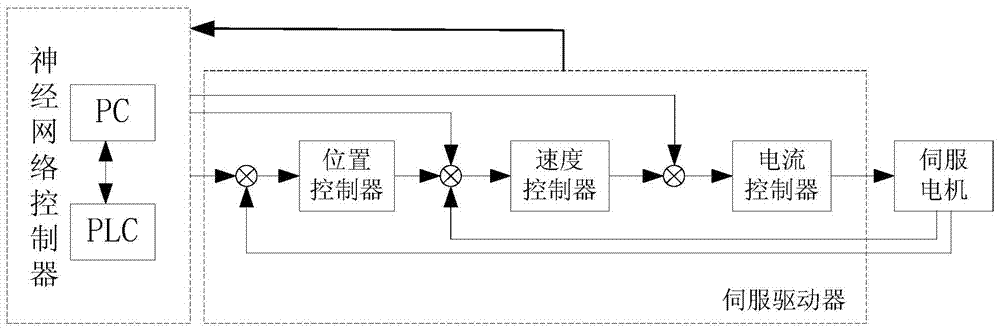
[0021] The implementation method of the present invention will be described below in conjunction with the accompanying drawings. The heavy-duty robot position controller combined with neural network control of the present invention includes a neural network controller and several servo controllers.
[0022] Each servo drive includes a position controller, a speed controller and a current controller.
[0023] The neural network controller outputs several position, speed and current control signals to each servo controller. The driving signal of each servo drive is fed back to the neural network controller, wherein the feedback signal includes position feedback signal, speed feedback signal and current feedback signal. Each servo driver drives a servo motor, the servo motor will feed back the position signal and current signal to the servo driver through its encoder, and then the servo driver will feed back the position signal and current signal to the neural network controller...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More