

Navigation system based on multi-sensor data fusion
A technology of data fusion and navigation system, applied in the field of robot navigation, can solve the problems of incomplete, unpredictable and unreliable data, improve real-time and accuracy, and avoid redundancy and contradiction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
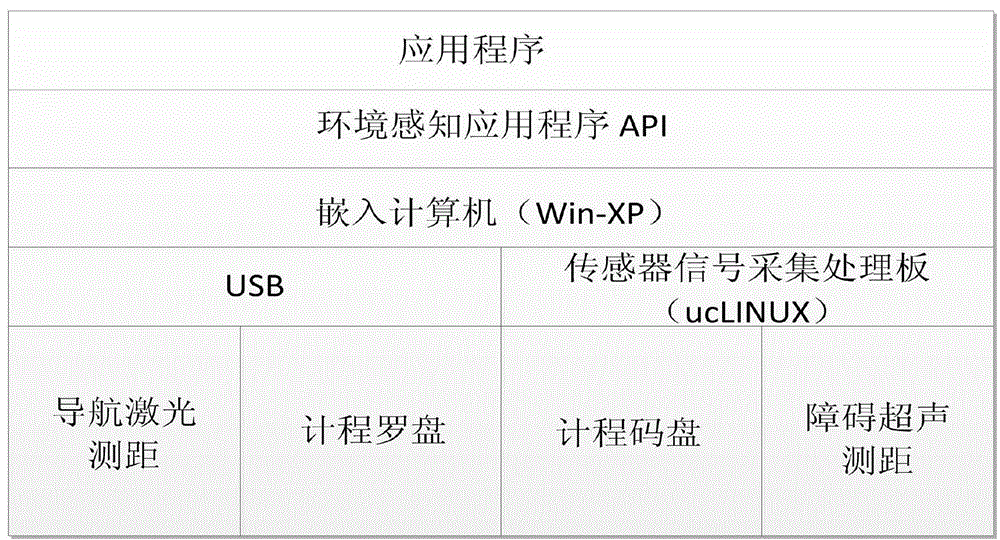
[0021] The hardware structure of the present invention is as figure 1 shown. Use the sensor signal acquisition and processing board to process the data collected by each sensor, and combine the environment perception application program API and the analysis and processing embedded in the computer to complete the navigation and positioning. The ultrasonic ranging sensor is used as the obstacle avoidance and obstacle walking measurement unit, and the laser scanning The sensor acts as a precise positioning and obstacle avoidance measurement unit.
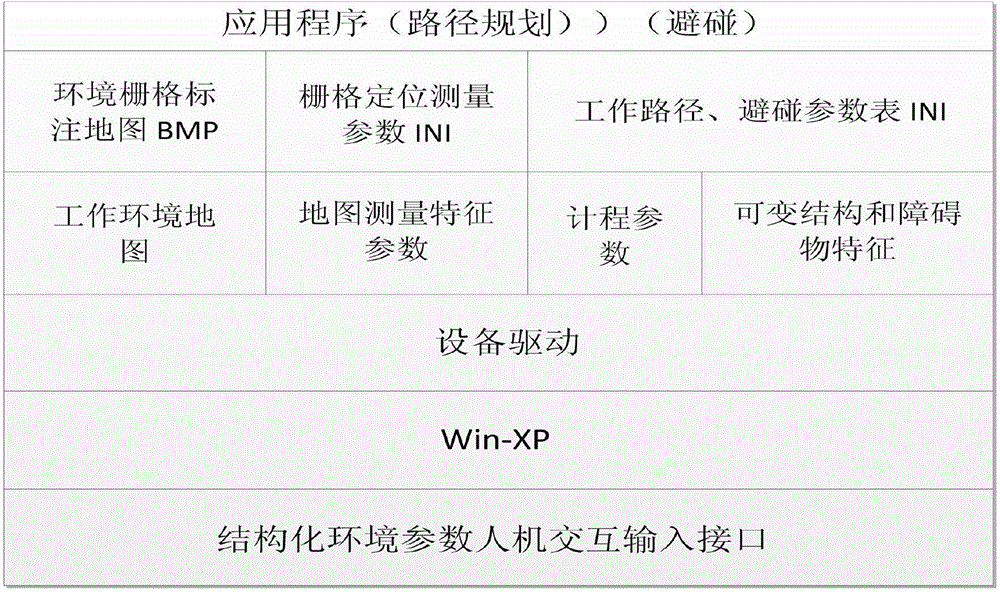
[0022] like figure 2 As shown in Fig. 1, combined with architectural drawings and surveyed work sites, the grid-marked map is artificially generated through the environmental modeling software module. Write the map editing software, input the architectural drawings into the computer, measure the architectural drawings and mark them on the grid map. Form a raster map containing information on the structure of the work environment (e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More