

Fast binary tree method for point location problem in control system
A control system and binary tree technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as unsatisfactory preprocessing time, unsatisfactory performance, control requirements, etc., and achieve improved online computing time and low-space storage. demand, the effect of shortening the preprocessing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The steps of the fast binary tree method of the present invention will be further described below in conjunction with the accompanying drawings. Refer to attached Figure 1-5 , Figure 6 .
[0047] Fast binary tree method of the present invention, concrete steps are as follows:
[0048] Step 1. The offline preprocessing process of the fast binary tree method, see the flow chart for details image 3 and Figure 4
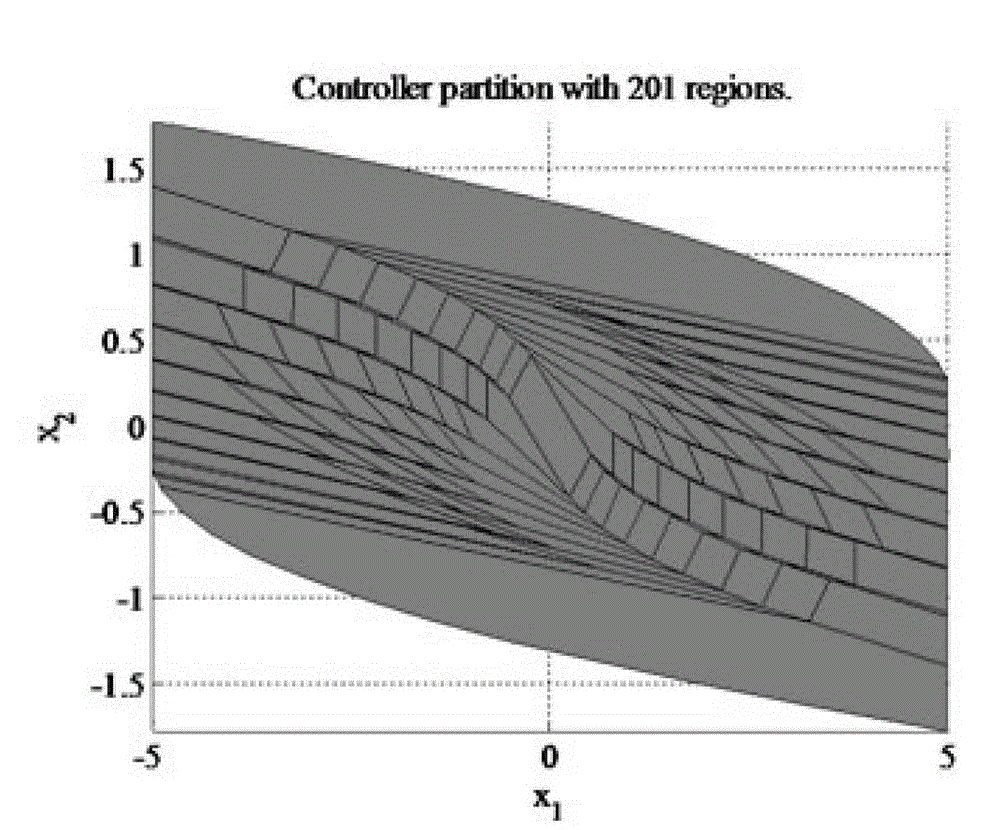
[0049] 1.1. Introduce multi-parameter quadratic programming into the control system, divide the system state space into convex partitions, and calculate the control rate corresponding to each partition, and save it in the FG array. For a schematic diagram of the state space partition, see figure 1 .
[0050] 1.2, remove the linearly dependent hyperplane and the outer boundary of the object space, and do not select them as candidate hyperplanes.
[0051] 1.3, group the partitions by eigenvalues (the eigenvalues here are the control rates), group the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More