

Under-actuated spatial manipulator end effector
A technology of space manipulators and end effectors, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of large size and heavy weight of under-actuated multi-fingered hands, and achieve the elimination of posture maintaining mechanism, light weight and low structure simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
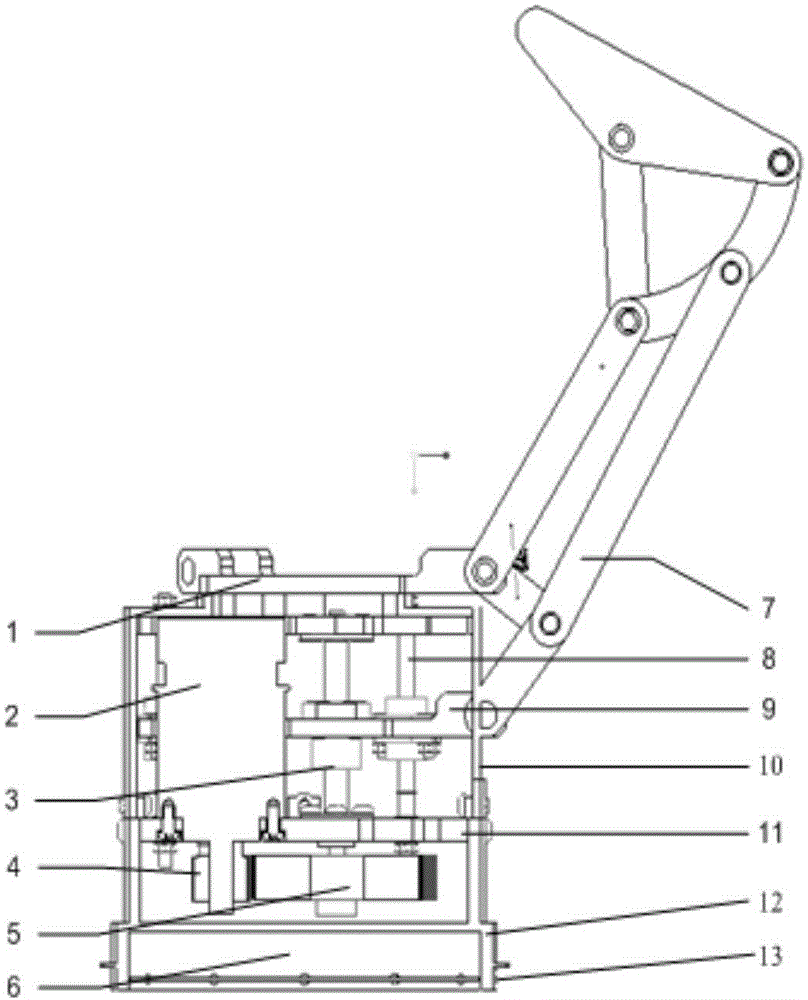
[0021] The end effector of the present invention mainly includes the following components:
[0022] Three two-degree-of-freedom mechanical fingers 7, a brushless servo motor and a planetary gear reducer 3, a set of reduction gears, a set of sliding screw assembly 3, a finger mounting plate 1, a finger drive plate 9, and a motor Mounting plate 11, three guide shafts 8, controller 6 and connecting flange 13, such as figure 1 shown (with two fingers hidden). The connecting flange 13 is the fixed end of the end effector, which is connected with the output end of the intelligent joint of the space manipulator. The bottom end of the controller 6 is coaxially connected with the connecting flange 13 , the top end is connected with the lower casing 12 , and the top end of the lower casing is coaxially fixed with the motor mounting plate 11 . Servomotor, sliding lead screw 3 and guide shaft are mounted upside down on the same side of the motor mounting plate 11, and are connected by l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More