

Four-rotor aircraft control method based on PID neural network (PIDNN) control
A quadrotor aircraft, neural network technology, applied in attitude control, adaptive control, general control system and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The technical solutions of the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings and examples of the present invention.
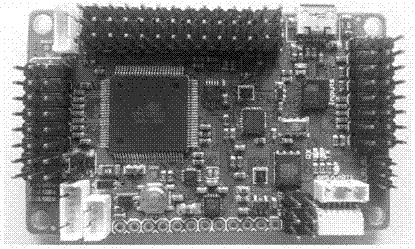
[0081] The present invention builds a quadrotor aircraft prototype, and applies the control method proposed by the present invention in the control system of the quadrotor aircraft. The main modules of the control system include the main controller module, sensor module, navigation module, motor control module, communication module and data acquisition module, etc. The hardware structure is as follows: Figure 5 shown.
[0082] Main controller module: the core processor of the flight control system, which is the core control part of the entire system, mainly responsible for collecting the attitude angle rate (pitch angle rate, roll angle rate and yaw angle rate) detected by the sensor, three-axis Based on the detected flight information, combined with the established con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More