

System and method used for perceiving shape of medical soft mechanical arm
A technology of soft machinery and robotic arms, applied in applications, sensors, medical science, etc., can solve problems such as unsuitable soft surgical robotic arms, endoscopes that cannot be twisted axially, and detection devices without torsion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
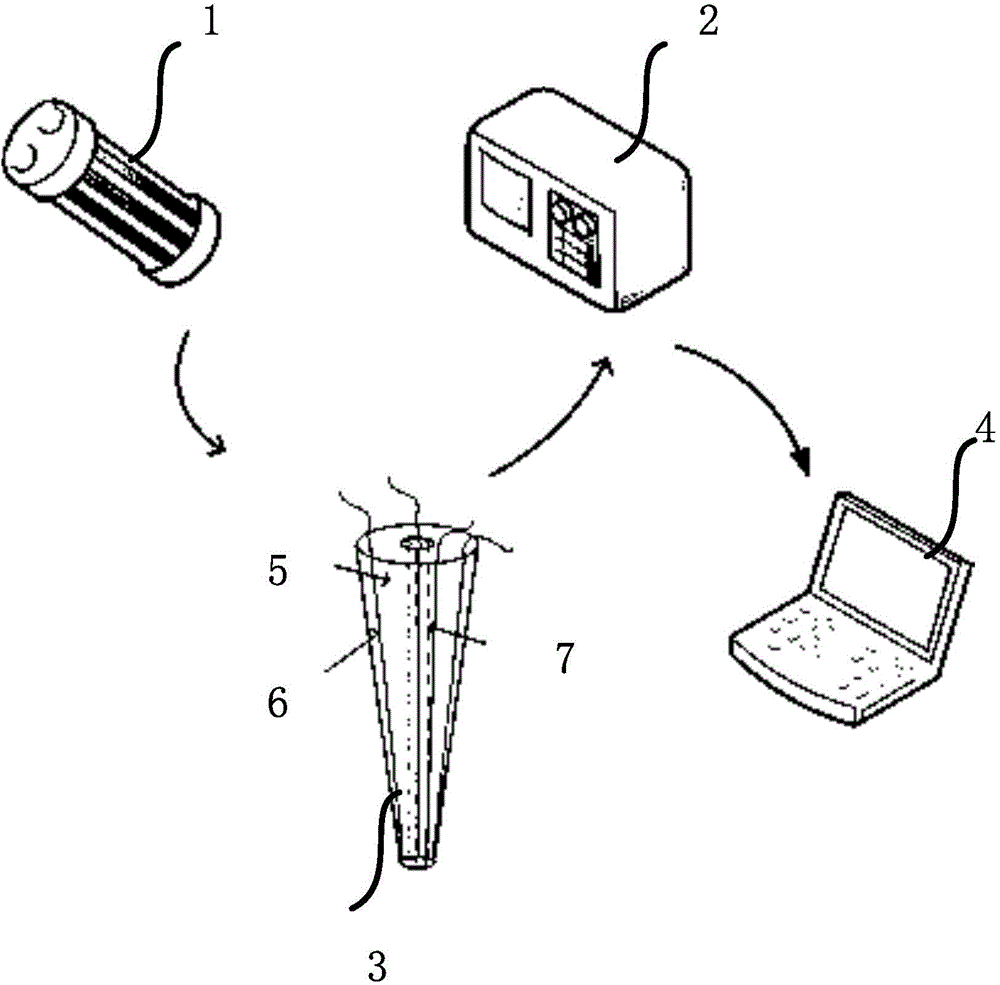
[0075] like figure 1 As shown, the system for sensing the shape of a medical soft manipulator according to the present invention includes a laser, a spectrometer, a soft manipulator, a sensor, and a computer; wherein, the laser emits a laser signal as an incident signal and enters the The sensor forms a reflected signal, the spectrometer transmits the received reflected signal to the computer, and the computer processes the reflected signal to obtain the shape information of the soft manipulator. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More