

Vision auxiliary device and method for automatic landing of unmanned aerial vehicle
An auxiliary device and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of difficulty in meeting landing requirements, poor attitude and position calibration effect, lack of multi-scale analysis mechanism, etc., and achieves low power consumption, simple structure, and processing speed. quick effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in further detail below in conjunction with the accompanying drawings.
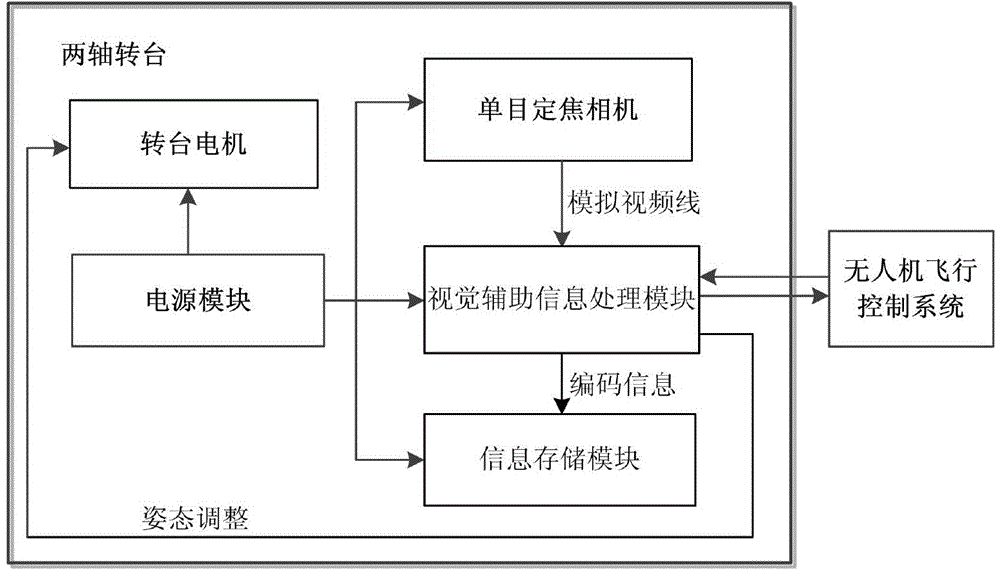
[0039] Such as figure 1As shown, the visual aid device for unmanned aerial vehicle autonomous landing of the present invention is mainly composed of a two-axis turntable, a turntable motor, a power supply module, a monocular fixed-focus camera, a visual aid information processing module and an information storage module. The two-axis turntable is installed at the head of the UAV, and the turntable motor, power module, monocular fixed-focus camera, visual aid information processing module and information storage module are all fixed on the two-axis turntable; the turntable motor is connected with the two-axis turntable, It is used to drive the movement of the two-axis turntable; the power module is respectively connected with the turntable motor, monocular fixed-focus camera, visual aid information processing module and information storage module, and is used ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More