

Dynamic surface controller structure and design method of parallel single-stage two-inverted pendulum
A double inverted pendulum, parallel single-stage technology, applied in adaptive control, general control systems, control/regulation systems, etc., can solve problems such as increased computational load, no consideration of input saturation characteristics, and unfavorable practical applications.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
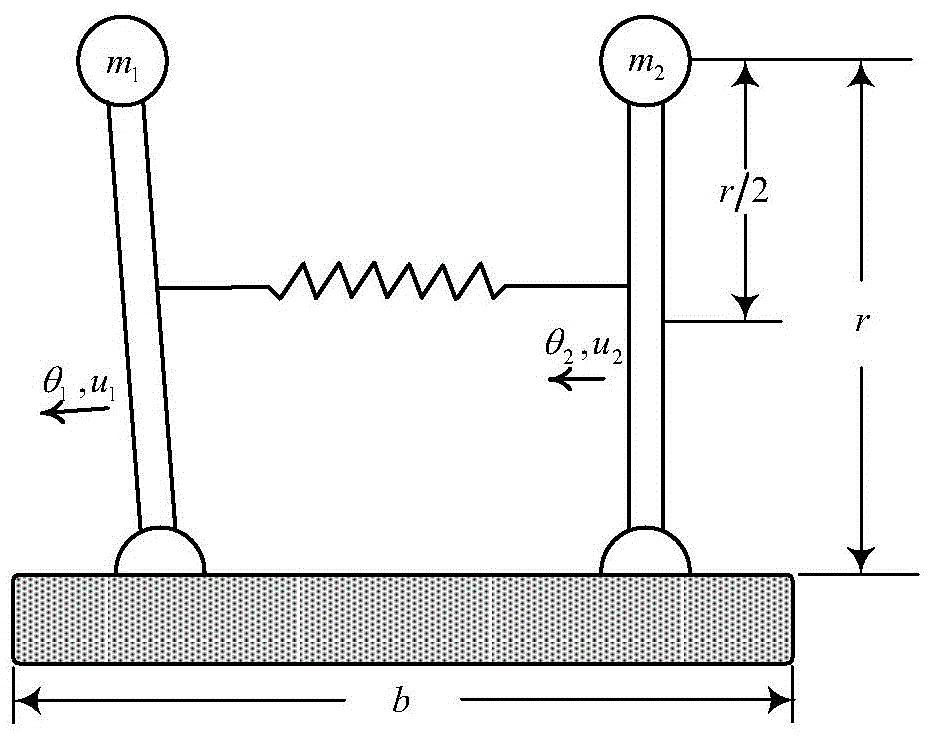
[0039] Such as figure 1 As shown, it is a schematic diagram of a parallel single-stage double inverted pendulum connected by springs of the controlled object in the present invention. The two single-stage inverted pendulums are connected by springs, where r is the height of the single-stage inverted pendulum, and b is the distance between the pendulum chains. distance, m 1 、m 2 are the pendulum mass respectively.
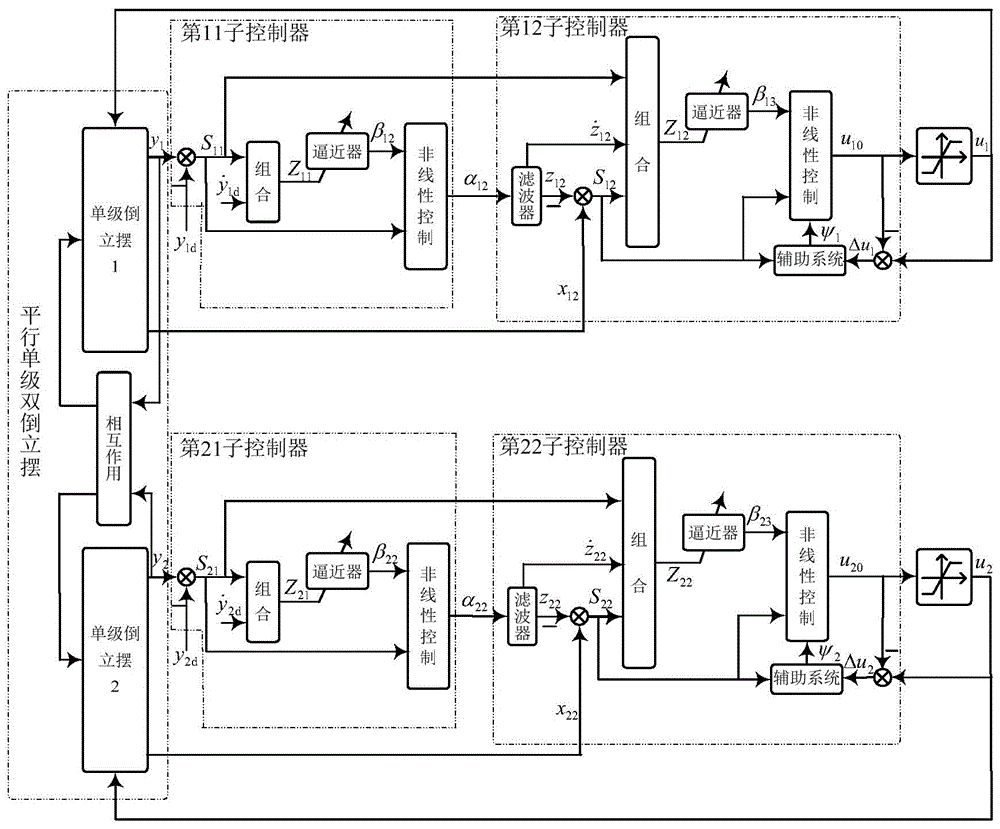
[0040] Such as figure 2 As shown, it is a schematic structural diagram of the dynamic surface controller of the parallel s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More