

UUV four degree-of-freedom dynamic positioning adaptive anti-interference sliding mode control system and control method
A dynamic positioning and self-adaptive technology, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve the problems of low estimation accuracy of system observer, complicated observer design process, and large model dependence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be described in further detail below in conjunction with the accompanying drawings.
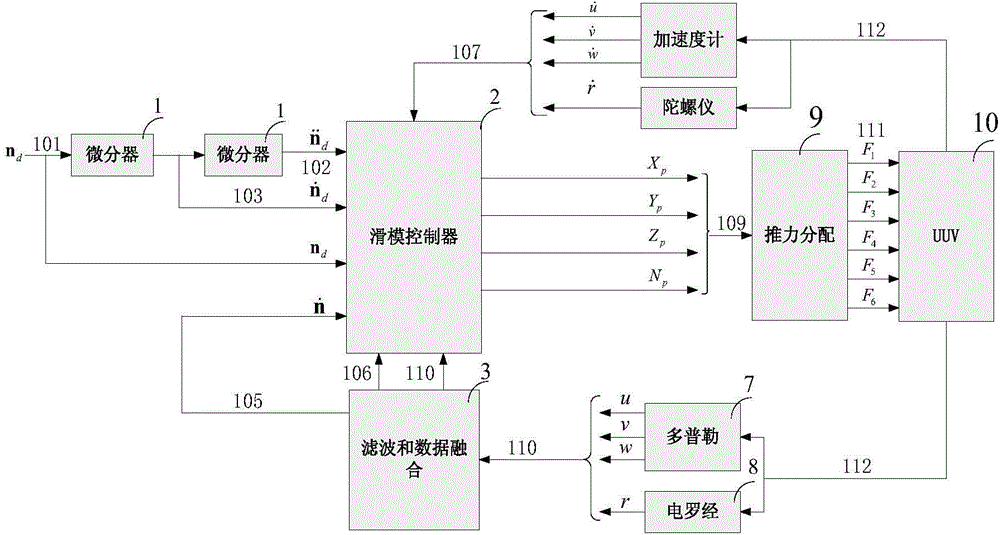
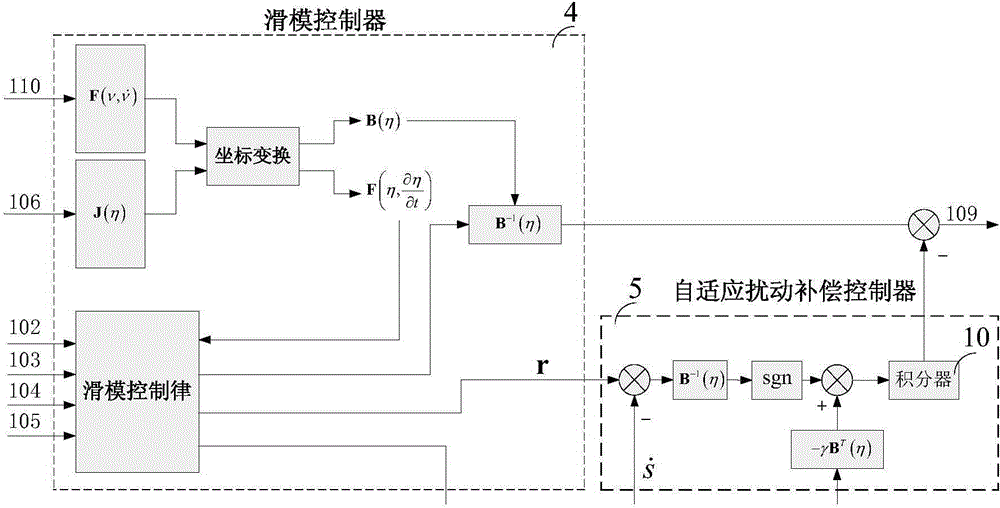
[0059] The main purpose of the present invention is to propose a UUV adaptive dynamic positioning control technology with strong stability and dynamic anti-interference performance based on the state space model system, to provide a relatively stable pose basis for UUV near-water operations, that is, UUV four-freedom Sliding mode adaptive control method for high-degree dynamic positioning.
[0060] 1. Four degrees of freedom dynamic model of UUV
[0061] The system of the invention relates to dynamic positioning control of four degrees of freedom of sway, surge, heave and yaw. Let p≡0, q≡0. The UUV four-degree-of-freedom dynamics model can be described by the following nonlinear differential equation:
[0062] v · = M - 1 f ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More