

Two-degree-of-freedom joint of space robot
A technology of space robot and degree of freedom, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of volume, weight, loose configuration, etc., achieve high transmission accuracy, reduce weight and volume, and simplify the joint structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solutions in the embodiments of the present invention will be clearly and completely described and discussed below in conjunction with the accompanying drawings of the present invention. Obviously, what is described here is only a part of the examples of the present invention, not all examples. Based on the present invention All other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0027] In order to facilitate the understanding of the embodiments of the present invention, specific embodiments will be taken as examples for further explanation below in conjunction with the accompanying drawings, and each embodiment does not constitute a limitation to the embodiments of the present invention.
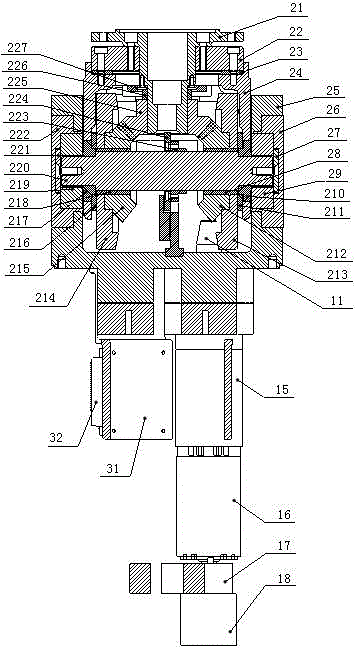
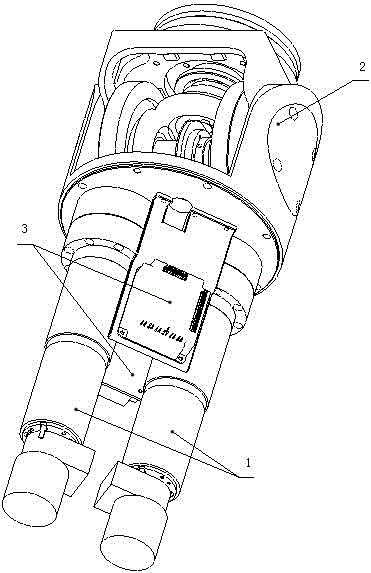
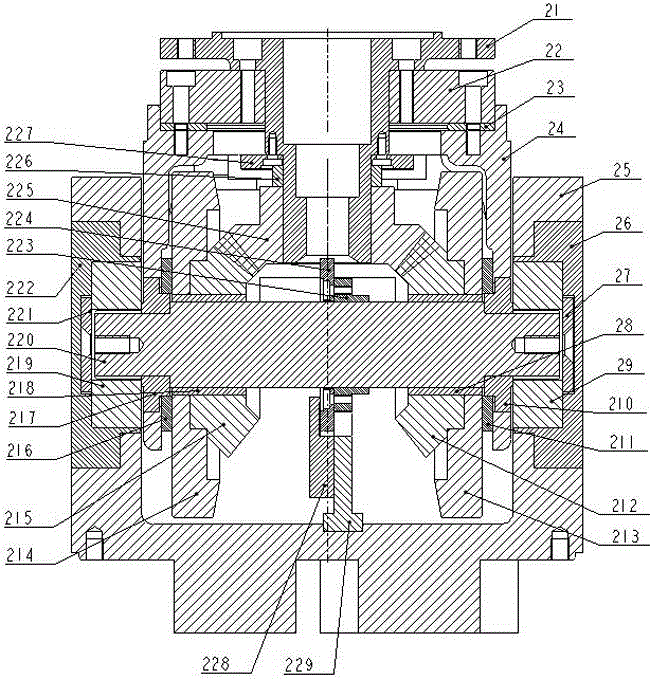
[0028] Such as figure 1 As shown, the two-degree-of-freedom joint of the space robot provided by the present invention includes three parts: two joint drive components 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More