Intelligent force control robot grinding system and method
A grinding and robot technology, applied in metal processing equipment, grinding machine parts, grinding/polishing equipment, etc., can solve the problems of large-scale curved surface processing and insufficient precision of automatic grinding devices, so as to improve processing accuracy and The effect of surface quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
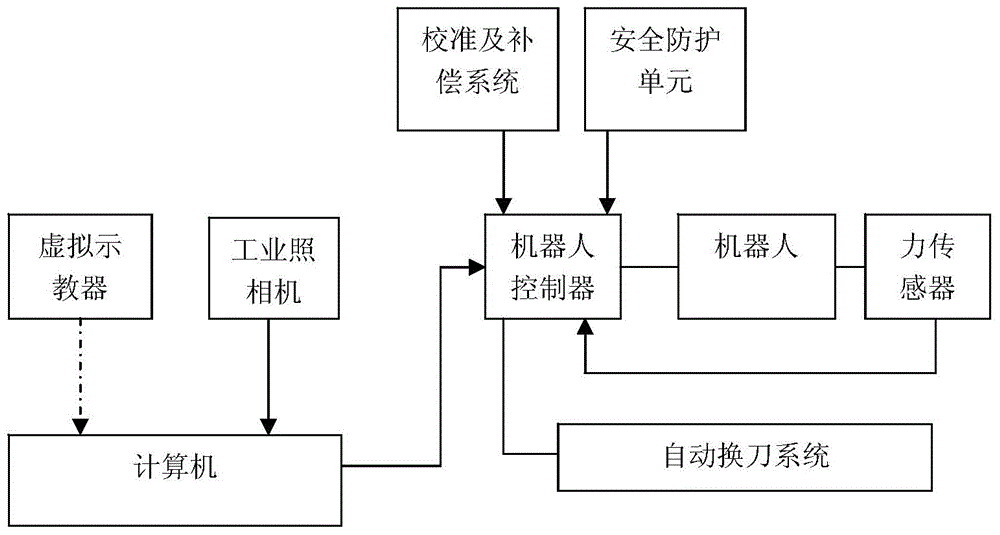
[0044] The present invention proposes a large-scale complex curved surface processing intelligent force control robot system, the system is composed as follows figure 1 As shown, it includes an automatic robot path planning mechanism and an intelligent machining mechanism based on force / position control; the automatic robot path planning mechanism includes a computer, a virtual teaching device, and an industrial camera. The intelligent machining mechanism based on force / position control includes robots and robot controllers, calibration and compensation systems, safety protection units, force sensors, and automatic tool change systems. The computer connected with the virtual teaching device and the industrial camera is connected with the robot controller, and the robot controller is connected with the robot, the calibration and compensation sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More