

Method and system for indoor self-construction map of mobile robot
A mobile robot and robot technology, applied in the field of automation, can solve the problems that the map is difficult to determine whether it is the same point, ignoring environmental details, robot position positioning, etc. Corresponding effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0083] Embodiment 1: A method for a mobile robot to build an indoor map by itself.
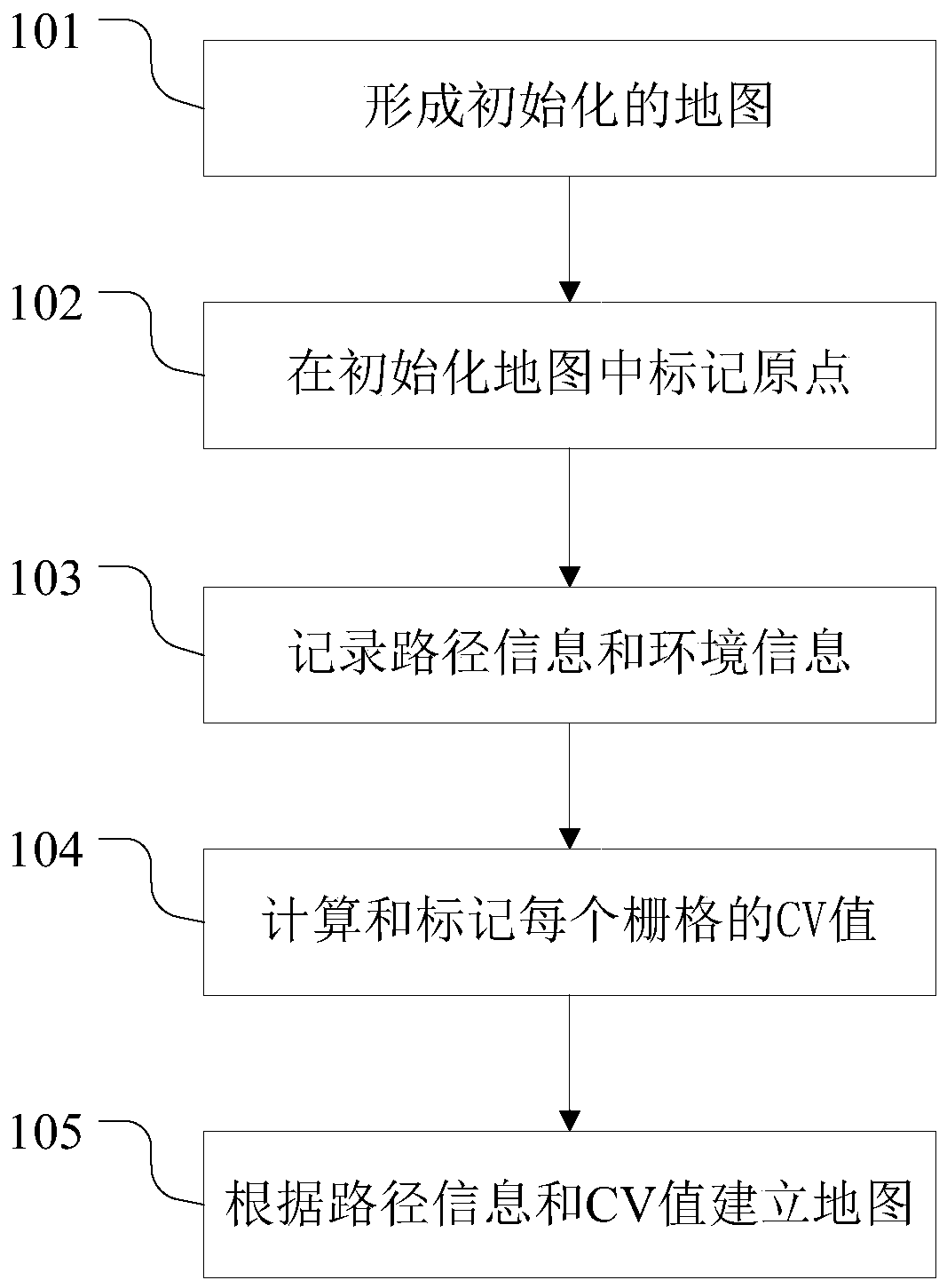
[0084] figure 1 It is a flowchart of a method for a mobile robot to build an indoor map by itself in Embodiment 1 of the present invention. Such as figure 1 As shown, the process includes the following steps:
[0085] Step 101, forming an initialized map.
[0086] The map is a grid pattern composed of a series of square grids;
[0087] The map marks the location of the indoor environment in a grid;
[0088] The initial map size is 400×400 grids, and each grid represents an indoor area with an actual size of 200mm×200mm;
[0089] The map stores grid information in a two-dimensional array, and the data type of the two-dimensional array is a self-defined data structure AStarNode, which is defined as follows:
[0090]
[0091] Among them, map_maze is a two-dimensional array of AstarNode data structure;
[0092] s_x is the position information of the abscissa (X coordinate);
[0093] s_y...
Embodiment 2
[0112] Embodiment 2: A method of self-constructing and initializing a grid map.
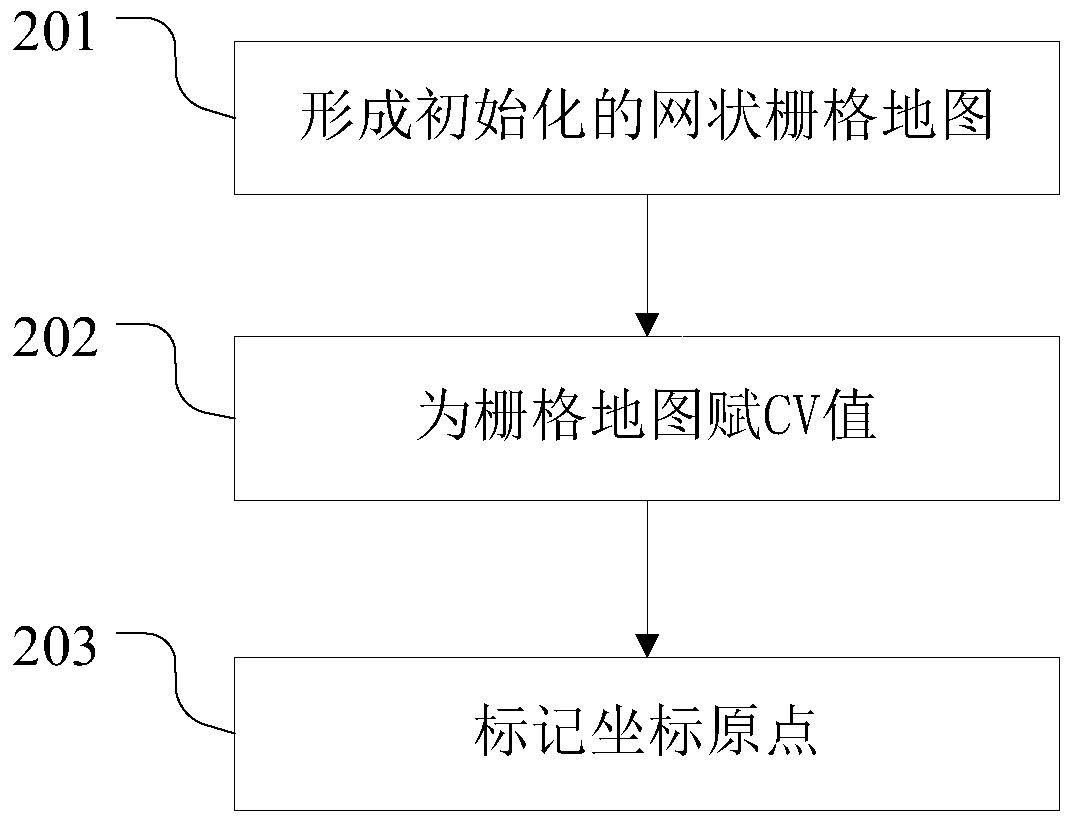
[0113] figure 2 It is a flowchart of a method for self-constructing and initializing a grid map in Embodiment 2 of the present invention. Such as figure 2 As shown, the method flow includes the following steps:
[0114] Step 201, forming an initialized mesh grid map.
[0115] The initialized grid map is a grid pattern composed of a series of square grids;
[0116] The initialized grid map marks the location of the indoor environment in grid form;
[0117] The initial map size is 400×400 grids, and each grid represents an indoor area with an actual size of 200mm×200mm;
[0118] The initial map stores the information of each grid in a two-dimensional array, and the data type of the two-dimensional array is a custom data structure AStarNode, which is defined as follows:
[0119]
[0120] Among them, map_maze is a two-dimensional array of AstarNode data structure;
[0121] s_x is the posi...
Embodiment 3
[0129] Embodiment 3: A method for recording a path of a mobile robot indoors.
[0130] Figure 4 It is a flow chart of a method for recording a path of a mobile robot indoors in Embodiment 3 of the present invention. Such as Figure 4 As shown, the process includes the following steps:
[0131] Step 301, the odometer records the moving distance of the robot.
[0132]Step 302, calculating the angle change of the robot movement.
[0133] angle change
[0134] Step 303, calculating the moving distance of the robot in the X and Y axis directions.
[0135] The X-axis movement distance is
[0136] The Y-axis moving distance is
[0137] X(0), Y(0) are the position of the robot at the initial moment, D(i) and is the driving distance and azimuth angle of the autonomous vehicle from time i-1 to time i.
[0138] Step 304, calculating the coordinate value of the position of the robot.
[0139] The X coordinate value is X(k) / 200, and the Y coordinate value is Y(k) / 200.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More