A Cartesian Coordinate Manipulator Control System
A Cartesian coordinate, control system technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inability to check the working state of the manipulator, no mobile terminal control, complex structure, etc., to achieve remote monitoring and operation, reduce Wiring complexity, small size effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
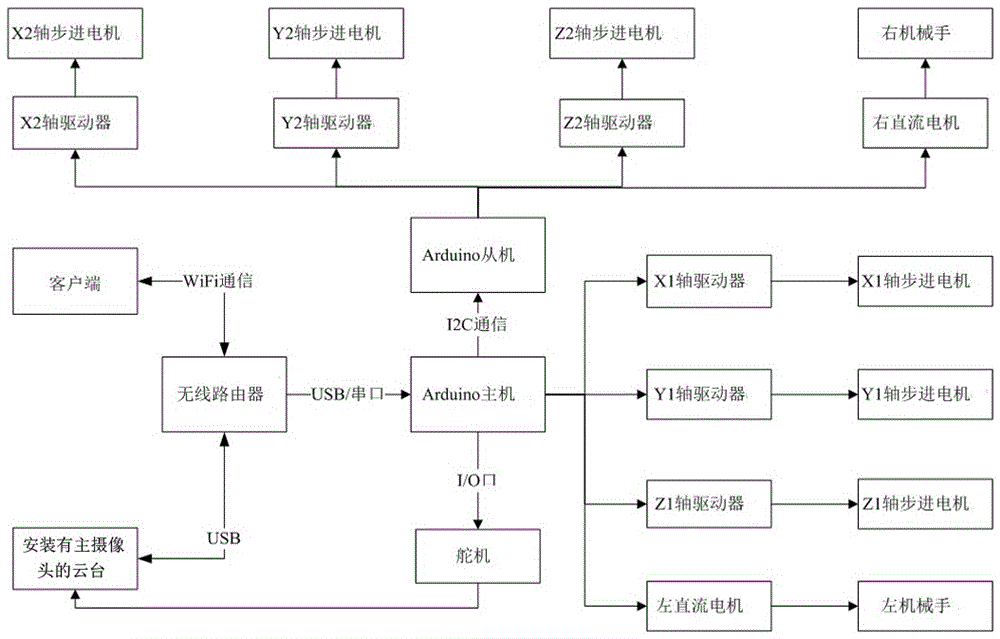
[0024] Please refer to figure 1 , the present invention provides a Cartesian coordinate manipulator control system, comprising an Arduino host, the Arduino host is respectively connected to a wireless router, a steering gear, a left manipulator control module and an Arduino slave, and the Arduino slave is connected to an Arduino slave The right manipulator control module is connected, and the wireless router is connected with a client terminal and a pan-tilt equipped with a main camera respectively, and the pan-tilt is connected with the steering gear; the left manipulator control module and the right manipulator control module are used respectively In order to control the left manipulator and the right manipulator, the main camera is used to collect the information of the left manipulator and the right manipulator and transmit the information to the cl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com