

Mobile robot-assisted surgical system having positioning function
A robotic surgery and mobile technology, applied in the field of mobile robotic surgery system, can solve the problems of individualized and diversified design of restraint compound operating room, single vascular machine control system and functional modules, hindering the in-depth development of interventional therapy technology, etc. Achieve the effect of improving positioning accuracy and positioning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
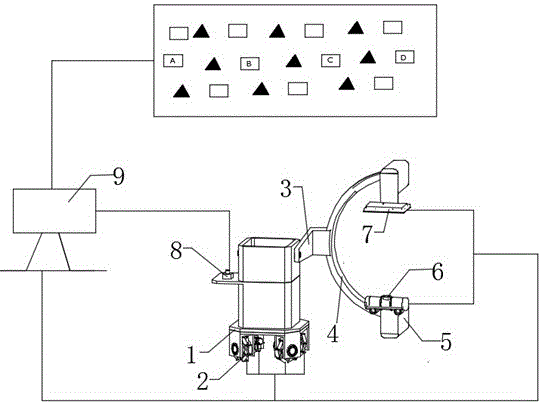
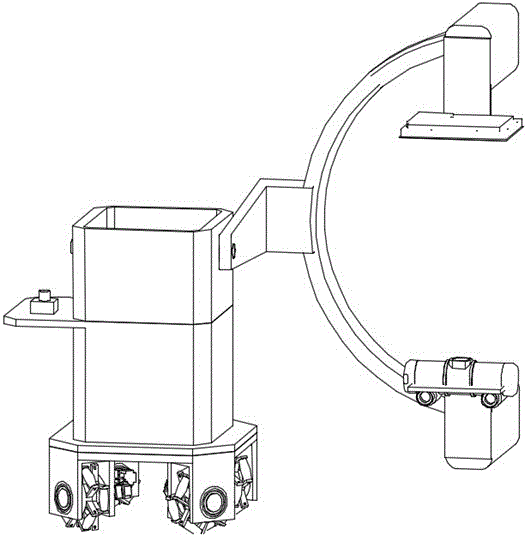
[0026] Such as figure 1 and figure 2 As shown, a mobile robotic surgery system with self-positioning function described in this embodiment includes: an omnidirectional mobile platform, an imaging system with a revolution and rotation mechanism, a positioning system, and a road sign indicating label installed on the indoor ceiling and control computer. The omni-directional mobile platform is composed of a mobile platform body (1) and 4 Meccana master wheels (2), and the 4 Meccana master wheels (2) are divided into two rows, arranged in parallel, and the Meccana master wheels (2) in the same row The main wheels (2) are respectively installed at both ends of the mobile platform body (1); the hollow cup motor is installed on the shaft core of the Mecanum main wheel (2), so that each set of Mecanum wheels can be driven independently, so as to realize Omni-directional mobile for omni-directional mobile platforms. The imaging system with a revolution and rotation mechanism is com...
Embodiment 2
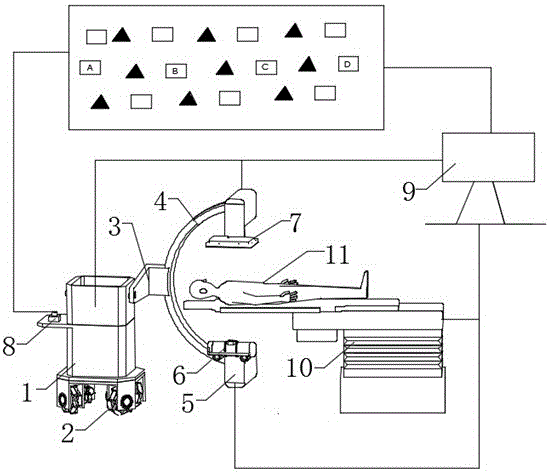
[0029] Such as image 3 As shown, this embodiment also includes a numerically controlled mobile treatment bed (10), and the rest of the structure is the same as that described in Embodiment 1. In this embodiment, when the patient (11) is undergoing interventional treatment of coronary heart disease, when the coronary angiography imaging of the heart is performed, the doctor's workstation will make a plan, and the doctor will issue an instruction, requiring the robotic surgery system to move to the treatment bed (10), and Make the image system with revolution and rotation mechanism be in standard pose. The control computer (9) of the mobile robotic surgery system with self-positioning function controls the rotation of the motors of the two rows of mecanum wheels (2) after receiving instructions, and moves the omnidirectional mobile platform to move along a certain path, and is installed on the mobile platform at the same time The camera (8) is aimed at the ceiling to continuou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More