

Indoor moving robot route planning method based on sensor network dynamic environment monitoring
A technology of sensor network and mobile robot, which is applied in the field of path planning for mobile robot by environment model, which can solve problems such as difficulty in implementation, complexity, and lengthy algorithm code, and achieve the effect of simple structure, excellent performance, and good completeness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In the following, the present invention will be further described in detail with reference to examples.
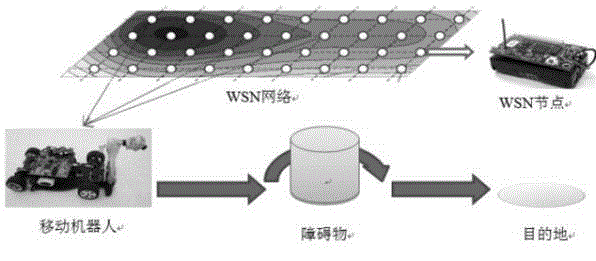
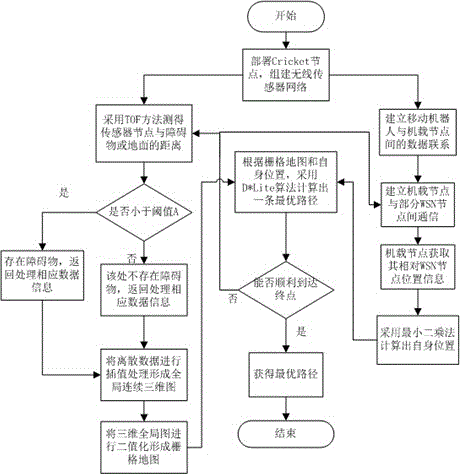
[0035] Aiming at indoor environment, relying on wireless sensor network to study robot path planning, the system includes Cricket node, mobile robot, sink node and remote PC. Specifically, the indoor roof is divided into a certain density of grids, and Cricket nodes are deployed in each grid point to form a wireless sensor network (WSN); WSN nodes detect obstacles on the ground through ultrasonic methods, and perform the returned discrete data. Processing, the data of all WSN nodes form a global continuous three-dimensional topographic map, which is binarized to form a 0-1 grid map to establish a dynamic environment model; the mobile robot airborne Cricket node wirelessly communicates with the WSN deployed on the roof The network establishes a communication link, obtains the relative distance between the three nearest nodes and itself, and uses the least square algorit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More