

Gravity compensation vertical subsystem control method based on slip form face
A technology of gravity compensation and control method, which is applied to the simulation device of space navigation conditions, space navigation equipment, transportation and packaging, etc., and can solve the problem of large area occupied by air compression processing equipment, no modeling control algorithm, and marble cost Expensive and other issues, to achieve the effect of fast response, reduced complexity, and reduced area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
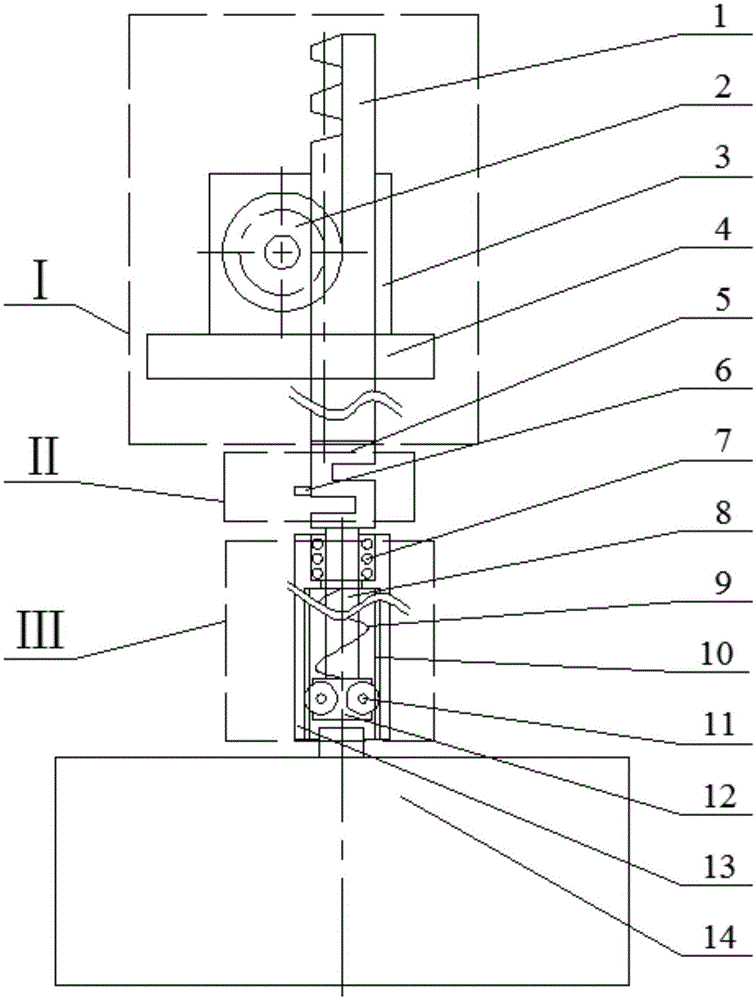
[0036] combine figure 1 , the actuator I includes a rack 1, a gear 2, a servo motor 3 and a motor mounting plate 4, the gear 2 is mounted on the motor shaft of the servo motor 3 fixed to the motor mounting plate 4, the rack 1 and the gear 2 are meshed and Driven by it to move; the sensing unit II includes a tension sensor 5 and a displacement sensor 6, the tension sensor 5 measures the force on the compression spring 9, the tension sensor 5 is installed on the lower end of the rack 1, and the displacement sensor 6 is installed on the side of the tension sensor 5 , the displacement sensor 6 measures the length variation of the compression spring 9; the spring module III includes a linear bearing 7, a guide rod 8, a compression spring 9, a rolling bearing 11, a bearing bracket 12 and a spring connecting sleeve 13, and the guide rod 8 is connected to the tension sensor 5 The lower end is matched with the linear bearing 7, and the lower end is equipped with a bearing bracket 12 fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More