

Underwater robot propulsion system
An underwater robot and propulsion system technology, applied in the directions of underwater ships, underwater operation equipment, motor vehicles, etc., can solve the problems of high coaxiality requirements, difficult processing of inner hubs, and cantilever length of inner and outer hubs, etc. The effect of small transmission noise, improved flexibility, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
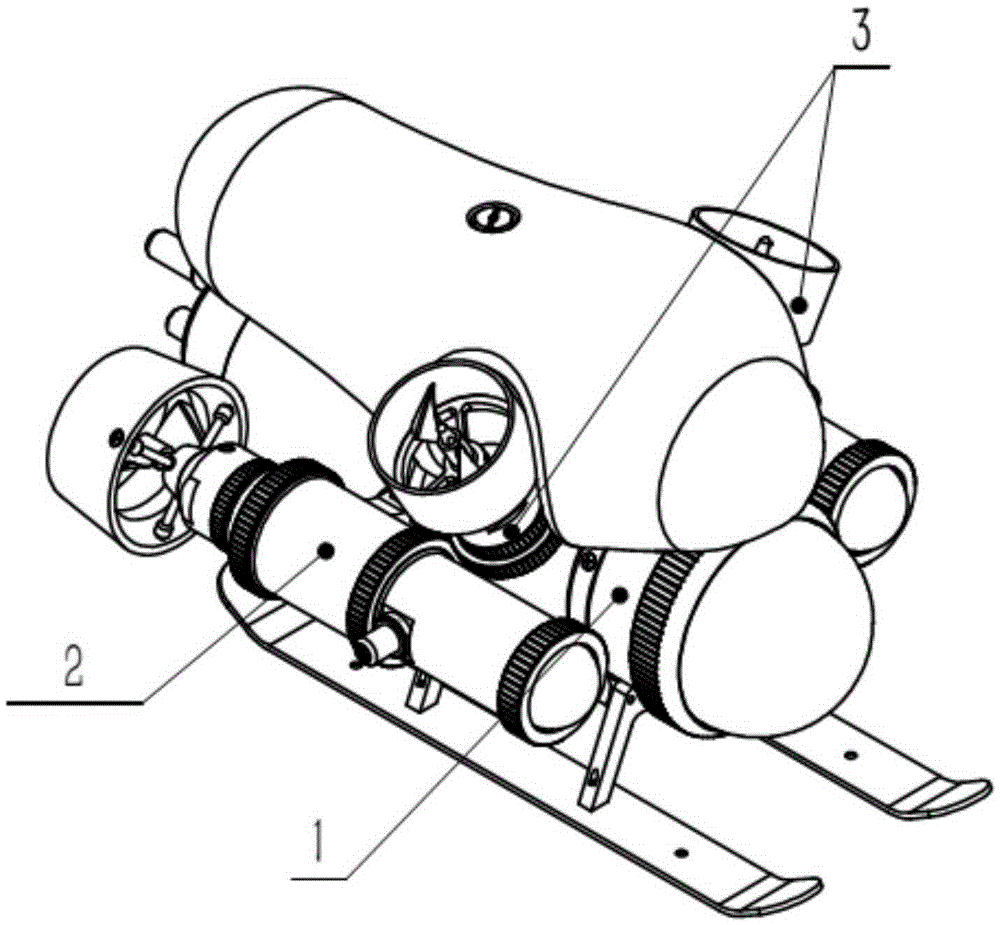
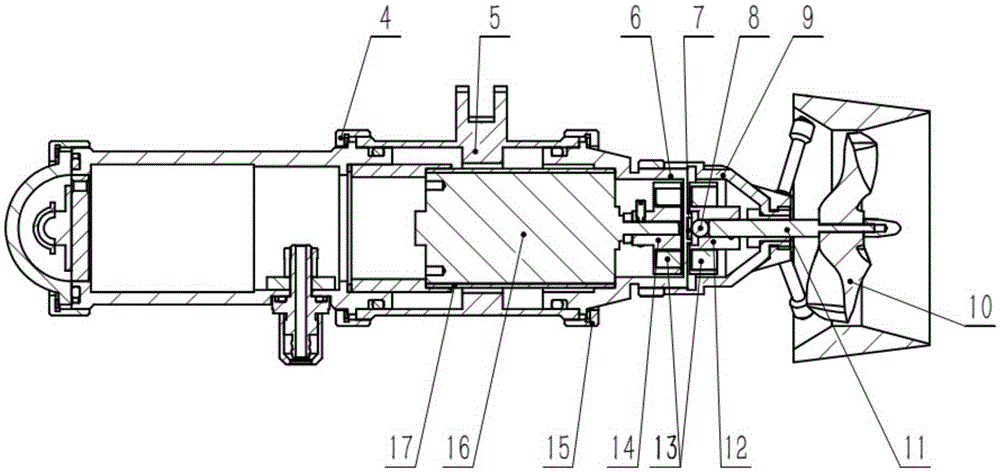
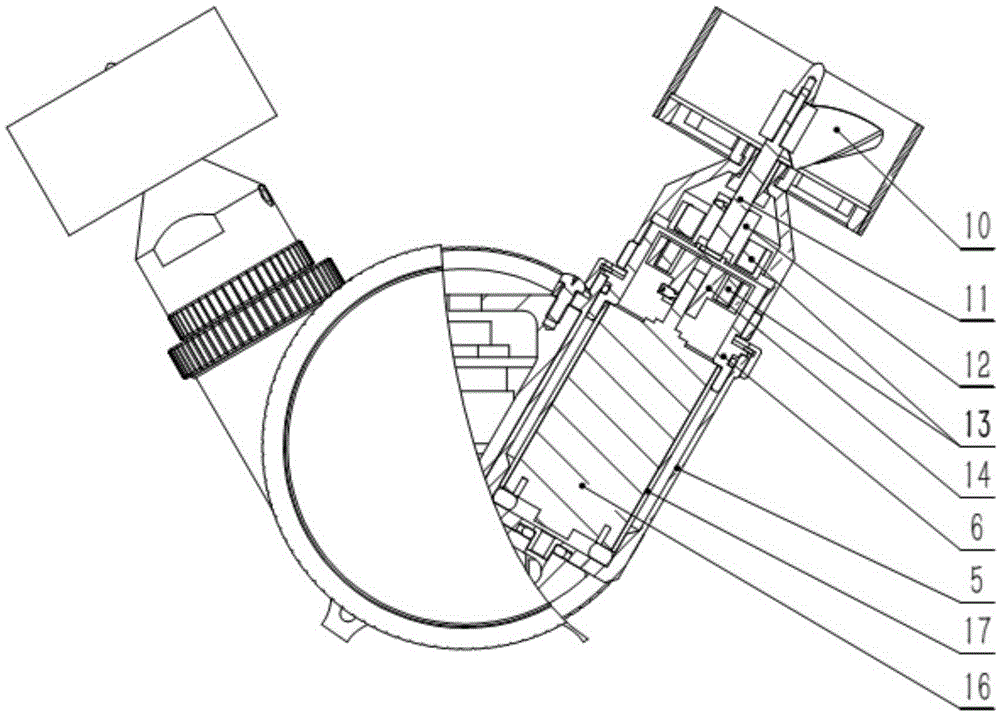
[0013] see Figure 1 ~ Figure 3 , a propulsion system for an underwater robot, comprising two horizontal propulsion modules 2 and two oblique propulsion modules 3, the two horizontal propulsion modules 2 are symmetrically arranged on both sides of the main cabin 1 of the robot in parallel to each other, and the two The oblique propulsion module 3 is embedded in the middle of the robot main cabin in a V-shaped cross in a plane perpendicular to the axis of the robot main cabin 1; the horizontal propulsion module 2 and the oblique propulsion module 3 both use propeller propulsion modules , the propeller propulsion module includes a motor 16 and its sealed cabin 5, the output shaft of the motor 16 is connected to the driven shaft 11 through a dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More