

Delayed feedback-based biped robot walking non-monocyclic gait control method
A biped robot and delayed feedback technology, which is applied in the non-single-cycle gait control field of biped robots, can solve the problems of inability to guarantee fast convergence of gait, large amount of calculation of OGY method, errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings and a set of specific embodiments.
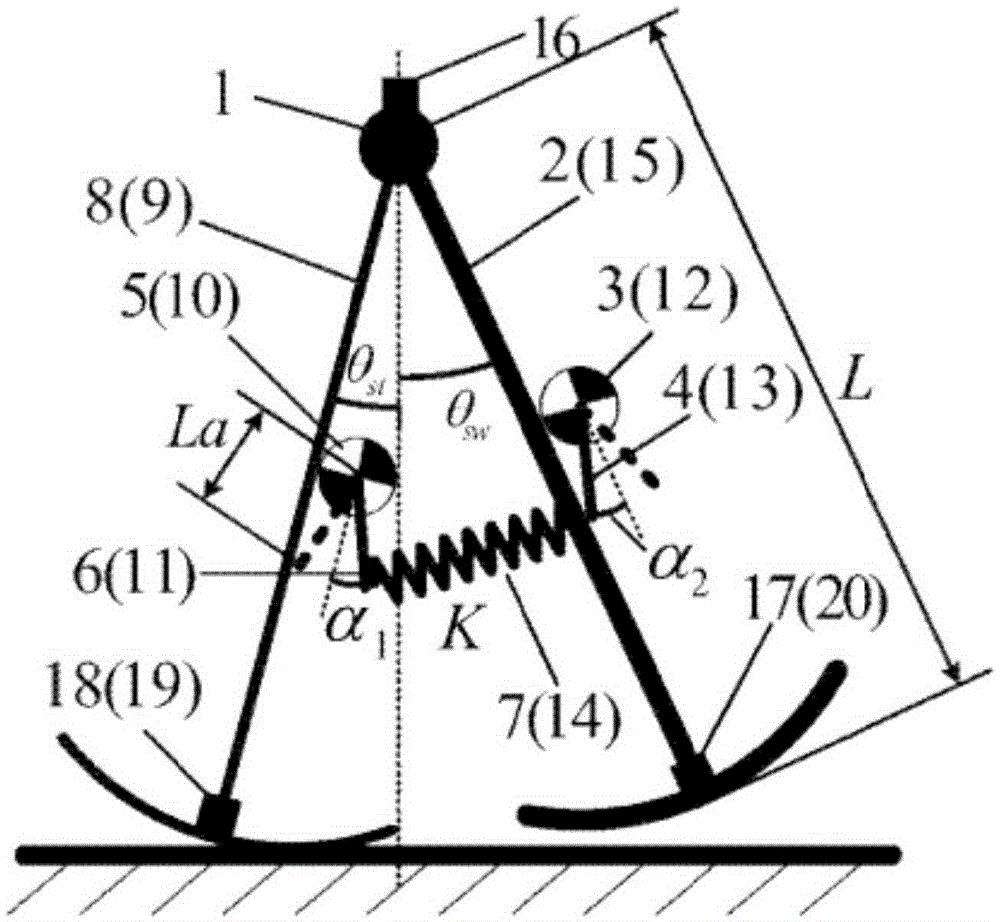
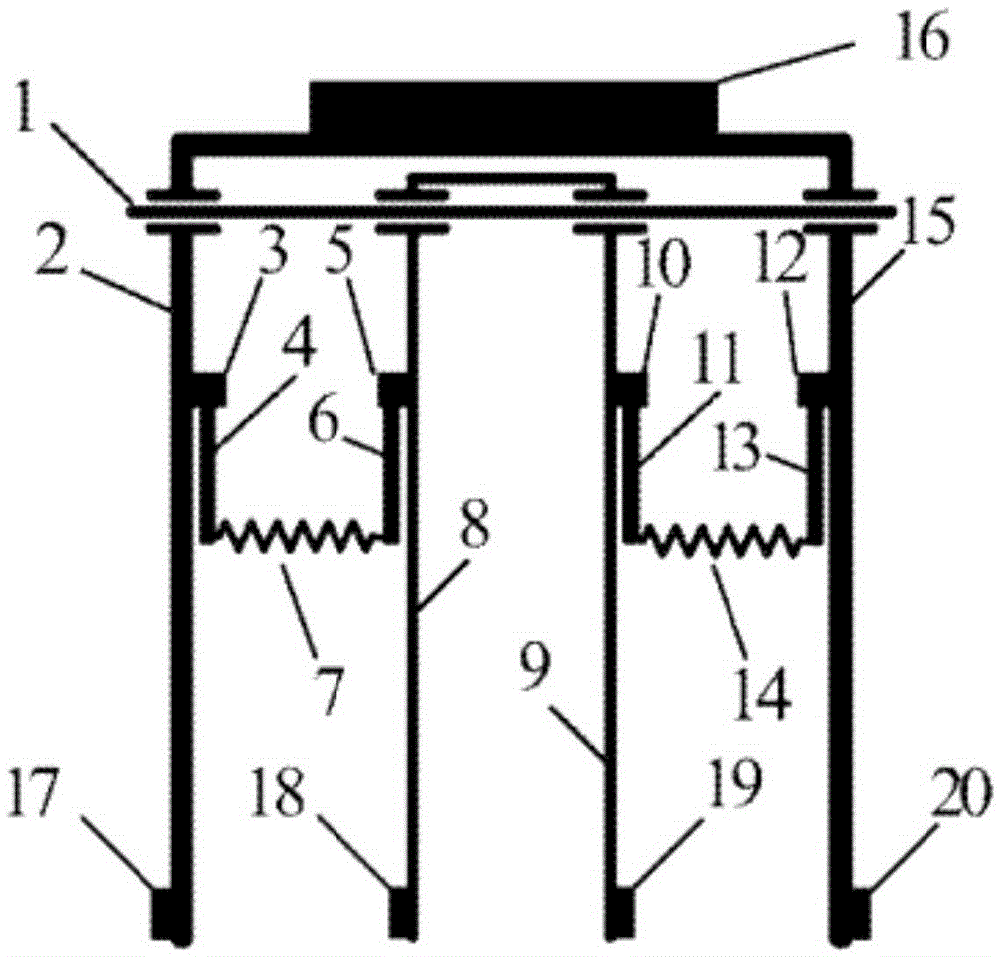
[0052] The schematic diagram of the robot model is shown in figure 1 and figure 2 As shown, 1 is the hip structure, 2 (15) is the outer leg, the lower end pin of the outer leg is provided with a collision sensor 17 (20), 8 (9) is an inner leg, and the lower end pin of the inner leg is provided with a collision sensor 18 (19), the sensor signal output end links to each other with the signal input end of controller 16, 5 (10) is the motor on the inner leg, and the motor rotating shaft is connected with drive rod 6 (11), and 3 (12) is the motor on the outer leg The motor, the motor rotation shaft is connected with the drive rod 4 (13), and the 7 (14) is a linear spring, the deformation of the spring is determined by the posture of the leg and the output of the motor. figure 1 The angle Φ between the middle driving rod and the parallel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More