

Real-time positioning method of mobile robot and mobile robot
A mobile robot, real-time positioning technology, applied in machine parts, automatic control of travel motion, instruments, etc., can solve the problems of increased positioning error, low precision, complex structure design, etc., to reduce the cumulative error, reduce the cumulative error, The effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The solution of the present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
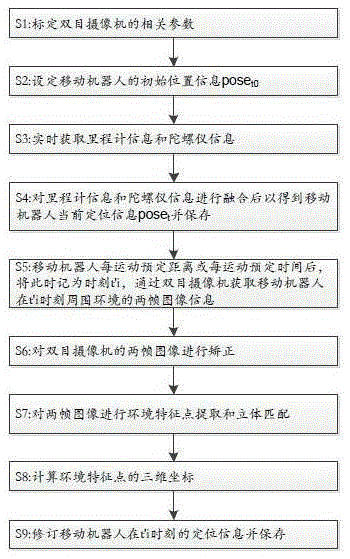
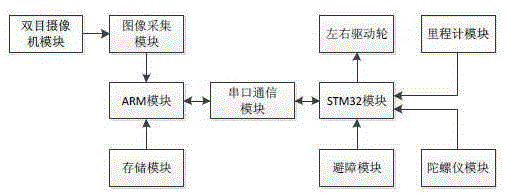
[0036] Such as figure 1 As shown, the mobile robot in the method of the present invention includes an MCU module, a binocular camera module, an image acquisition module, an odometer module, a gyroscope module, a data acquisition module, a motion module, a communication module, and a storage module. The MCU module uses Used to calibrate the relevant parameters of the binocular camera module and set the initial positioning information pose of the mobile robot t0 , Kalman filter fusion is performed on the data information of the odometer module and the data information of the gyroscope module to obtain the positioning information pose of the mobile robot at time t t And execute the SLAM algorithm to obtain the revised positioning information pose of the mobile robot at time t t-mod The image acquisition module is used to collect image in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More