

Unmanned aerial vehicle automatic landing locus control method based on double models
A trajectory control and automatic landing technology, applied in the direction of non-electric variable control, attitude control, control/adjustment system, etc., to achieve the effect of easy implementation, fast response and good control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0085] Below in conjunction with accompanying drawing, each part design method in the present invention is further described:
[0086] The present invention "a kind of UAV automatic landing trajectory control method based on dual models", its specific steps are as follows:
[0087] Step 1: Establish the kinematics and dynamics model of UAV and aircraft carrier
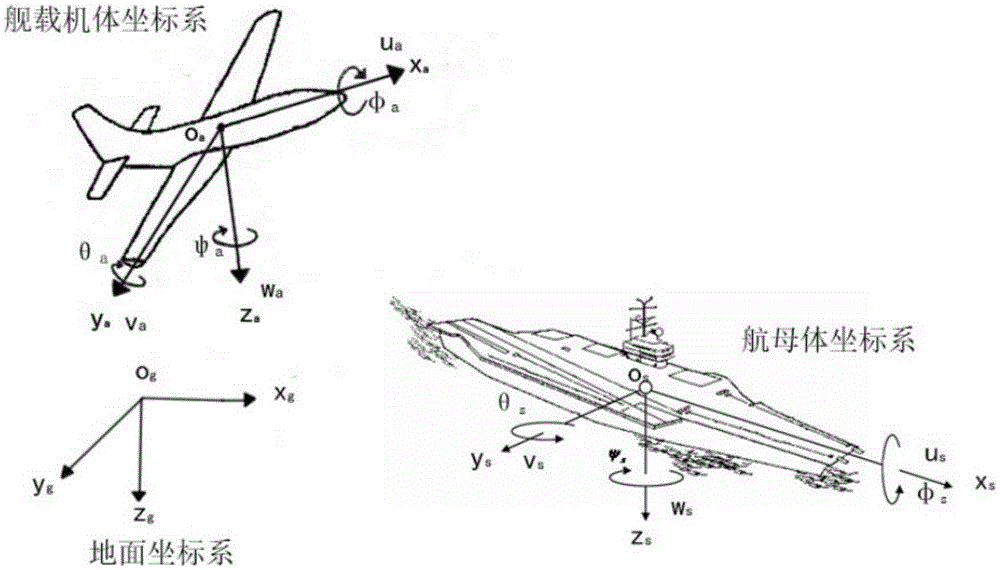
[0088] 1) if figure 1 As shown, the body coordinate system O is established with the UAV center of gravity as the origin a x a the y a z a ; Establish a body coordinate system O with the center of gravity of the aircraft carrier as the origin s x s the y s z s ;Establish an inertial coordinate system O with any point on the ground as the origin g x g the y g z g , where the origin O g is any point on the ground, O g x g pointing north, O g the y g Pointing East, O g z g point to the center of the earth.
[0089] 2) The UAV dynamics model is as follows The aircraft carrier plane dynamics model is a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More