

Worm wheel type driving pipeline robot system based on high-strength spring wall press apparatus
A pipeline robot, high-strength technology, applied in control/adjustment system, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve problems such as difficult stable operation, poor control effect, etc., to avoid Accidental injury, realization of online detection and diagnosis, and effect of ensuring effective detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
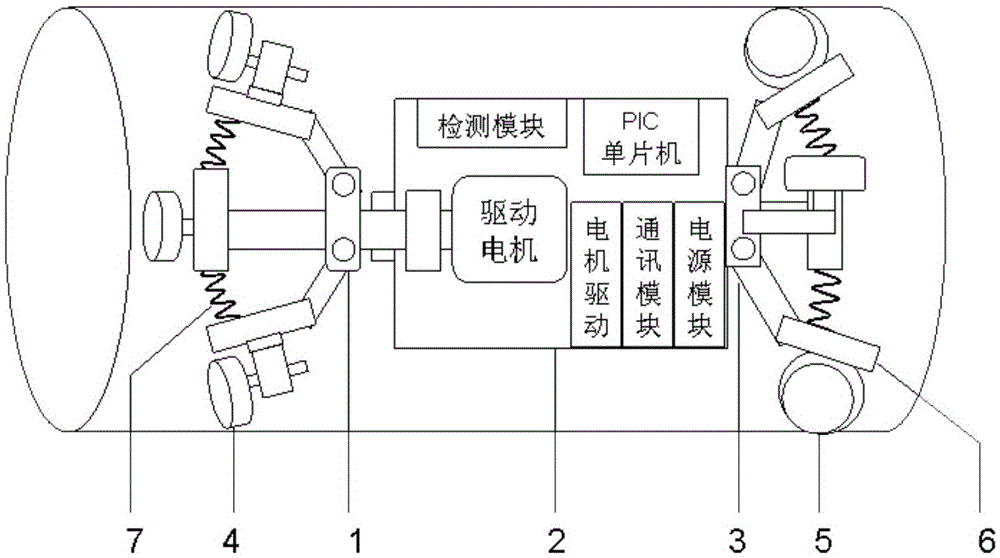
[0040] Example: A helical wheel-driven pipeline robot system based on a high-strength spring-loaded wall device (see figure 1 ), which is characterized in that it includes a body mechanical structure and a control system; wherein, the body mechanical structure is composed of a screw head 1, a body 2 and a cage 3; the body 2 is the main body of the robot, and the screw head 1 and the cage 3 are installed on the fuselage 2; the screw head 1 is distributed and installed with driving wheels 4 in the circumferential direction; the cage 3 is distributed and installed with guide wheels 5 in the circumferential direction; the driving wheels 4 and The guide wheels 5 are connected to the screw head 1 and the cage 3 through the connecting rod 6 .
[0041] The screw head 1 is evenly distributed with three groups of driving wheels 4 in the circumferential direction, and the interval between each two groups of driving wheels 4 is 120° (see figure 1 ).
[0042] Each of the three groups of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More