

Steering-by-wire steering platform and manipulation method for a heavy-duty manned legged robot
A wire-controlled steering and robot technology, applied in mechanical steering mechanisms, steering mechanisms, electric steering mechanisms, etc., to increase driving comfort, reduce manipulation burden, and improve compliance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
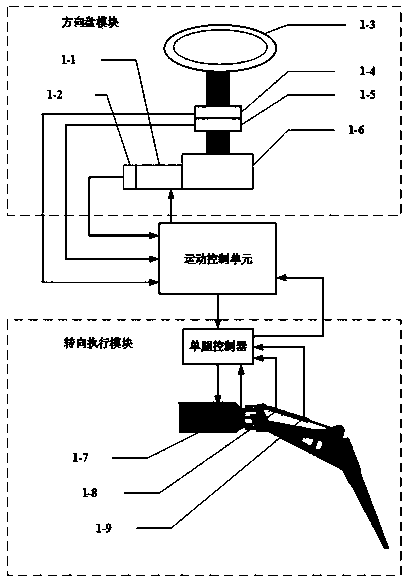
[0039] Specific implementation mode 1: refer to the attached figure 1 Describe this embodiment in detail, the linear steering manipulation platform of the heavy-duty manned legged robot described in this embodiment includes a steering wheel module, a motion control module and a steering execution module, and the steering wheel module is composed of a steering wheel, a steering shaft, a torque sensor, Composed of a rotation angle sensor, a road sensor motor, a reducer and a motor current sensor; the motion control unit module is composed of a motion planning unit and a motion controller; the steering execution module is composed of a single-leg controller, a three-degree-of-freedom hydraulically driven leg , rotary transformer, pressure sensor and displacement sensor.
specific Embodiment approach 2
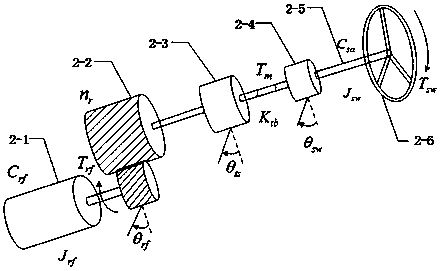
[0040] Specific embodiment 2: This embodiment is a further description of the manipulation method realized by the steering-by-wire steering platform of a heavy-duty manned footed robot described in specific embodiment 1. figure 2 Specifically explaining this embodiment, the steering wheel in the steering wheel module is fixed to one end of the steering shaft through a key connection, and its function is manifested in two aspects. On the one hand, it converts the torque input by the driver into a steering angle and outputs it; feedback information to the driver.
specific Embodiment approach 3
[0041] Specific embodiment 3: This embodiment is a further description of the manipulation method realized by the steering-by-wire steering platform of a heavy-duty manned footed robot described in specific embodiment 1. figure 2 Specifically explaining this embodiment, the steering shaft in the steering wheel module is used as a rigid connector to connect other devices in the module in series, and to apply the road surface information simulated by the road sensor motor to the steering wheel.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More