

Six-degree freedom motion control system for operating type ROV
A motion control, degree of freedom technology, applied in adaptive control, general control systems, control/regulation systems, etc., and can solve problems such as complex algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be further described below in conjunction with the accompanying drawings.
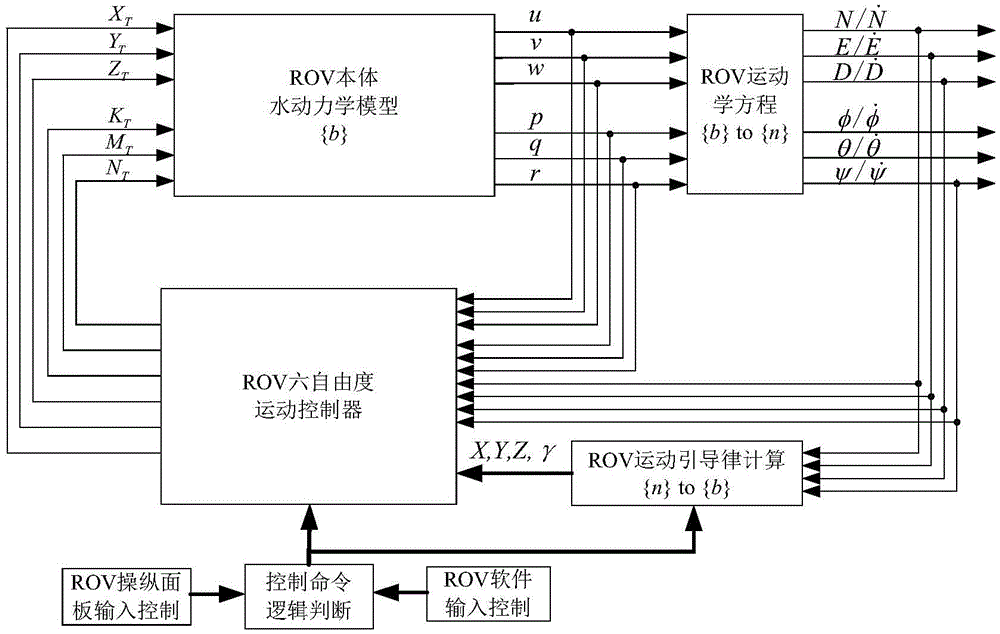
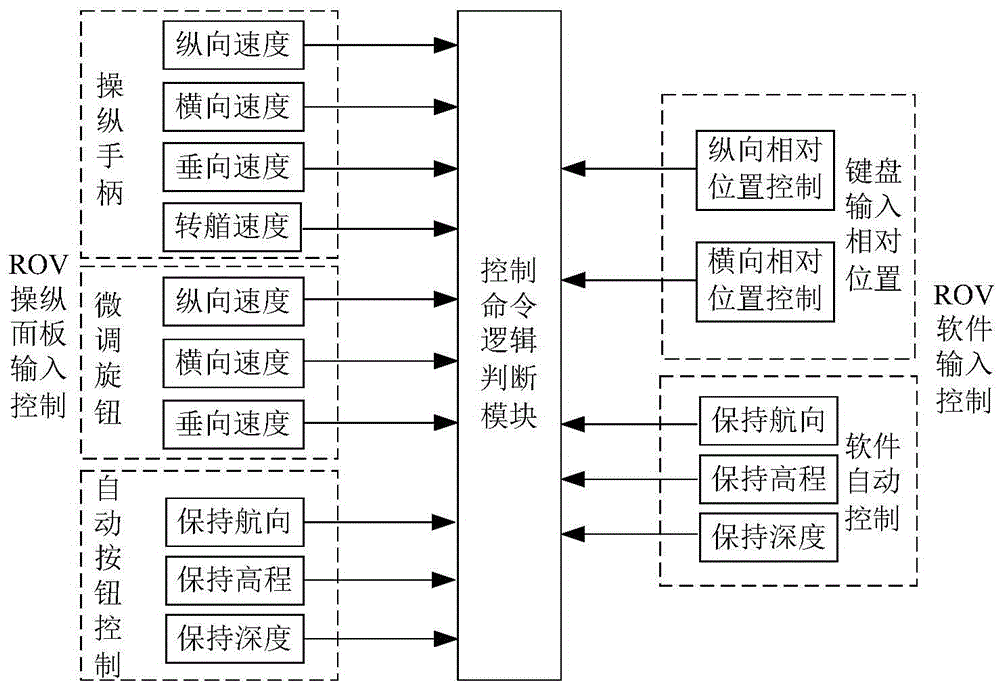
[0076] Based on an operational ROV hydrodynamic model, an operational ROV six-degree-of-freedom motion control system is designed, including: ROV body hydrodynamic model, ROV kinematic equation module, ROV six-degree-of-freedom motion controller, and ROV motion guidance Law calculation module, ROV control panel input control module and ROV software control input module.
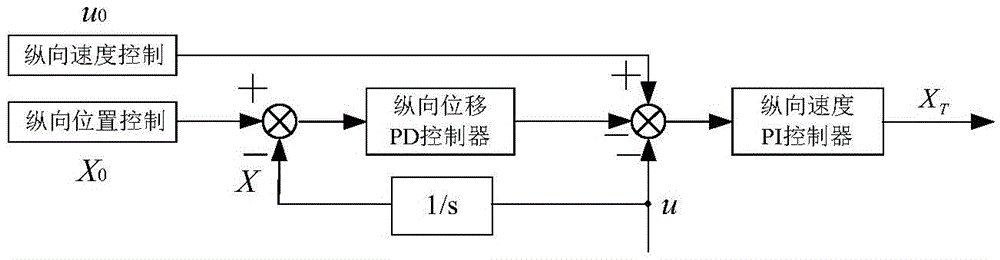
[0077] The motion controller of the six degrees of freedom of the ROV adopts a double-closed-loop PID controller in the ROV body coordinate system, in which the inner loop is a speed loop and uses a PI control algorithm; the outer loop is a position loop and uses a PD control algorithm. The speed control commands of longitudinal, lateral, vertical and bow can be input through the inner ring to realize the speed control of ROV's forward and backward, lateral, heave and bow direction. The position cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More