

Man-machine interaction control method for space universal rotating magnetic field
A rotating magnetic field, human-computer interaction technology, applied in medical science, diagnosis, endoscopy, etc., can solve the problem of less control variables of attitude and angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
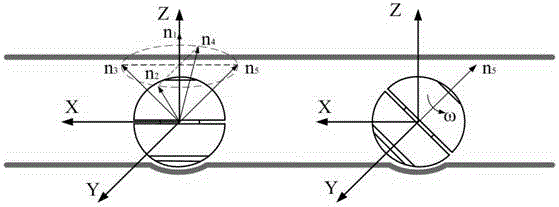
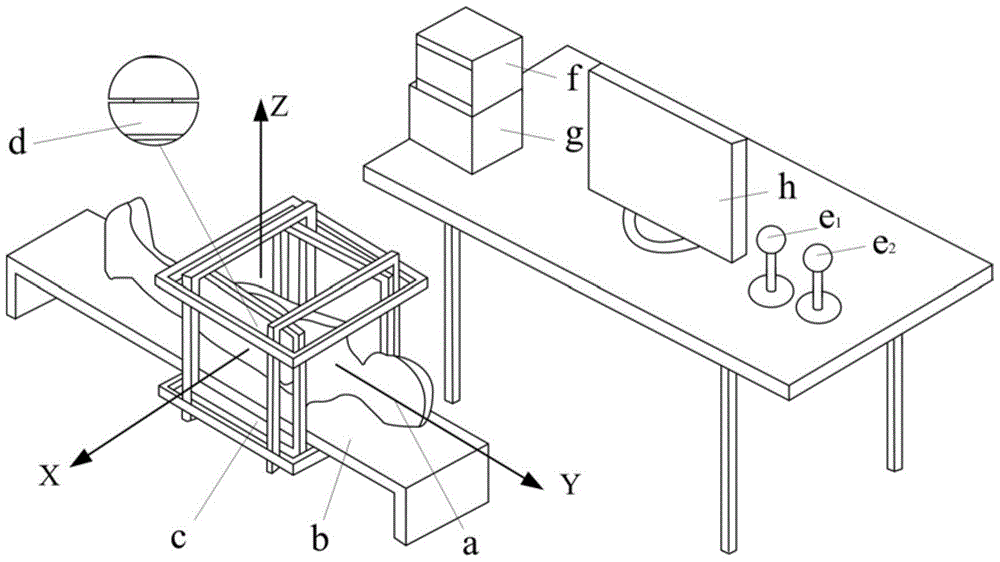
[0061] combined with image 3 , the space universal rotating magnetic field human-computer interaction control system consists of joystick input devices (including side swing joystick e 1 with pitch stick e 2), a signal processor f, an external magnetic field driver g, a three-axis orthogonal nested Helmholtz coil magnetic field superposition device c, a camera and image transmission device 8, and a human-computer interface h.
[0062] Implementation steps of the present invention are as follows:
[0063] (1) Three sets of coils are nested orthogonally to each other to form a three-axis orthogonally nested Helmholtz coil magnetic field superposition device c, allowing user a to swallow the active and passive dual hemispherical capsule robot d, and lie on platform b Above, adjust the position of the platform b so that the user d is in the central area of the three-axis orthogonal nested Helmholtz coil magnetic field superposition device c.
[0064] (2) In combination with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More