

Probe vehicle for hidden roadbed danger detection and detection method thereof
A technology for roadbed hidden dangers and detection methods, which can be applied to measurement devices, geophysical measurements, instruments, etc., and can solve problems such as inconvenient operation, short coupling time of detectors to ground, and large coupling noise.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
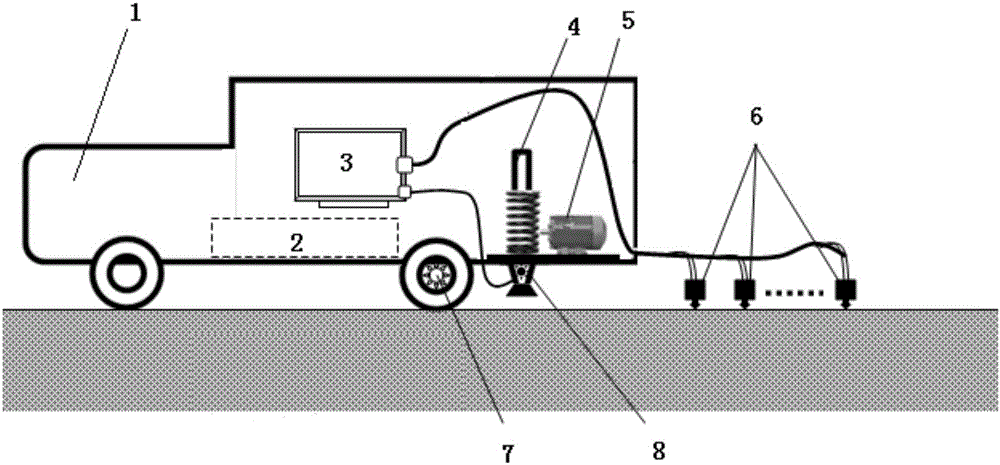
[0093] In this embodiment, the vehicle body of the probe vehicle is an electric vehicle with its own electric driving power. Such as Figure 1-Figure 5 Shown:
[0094] The detection car used for roadbed hidden danger detection in the present embodiment comprises: car body 1, control system 2, seismograph 3, seismic source, seismic sensor 6 and travel acquisition device 7, and described seismic source comprises impact device 4 and seismic source motor 5 and A trigger sensing device 8 attached to the impact device 4, wherein:
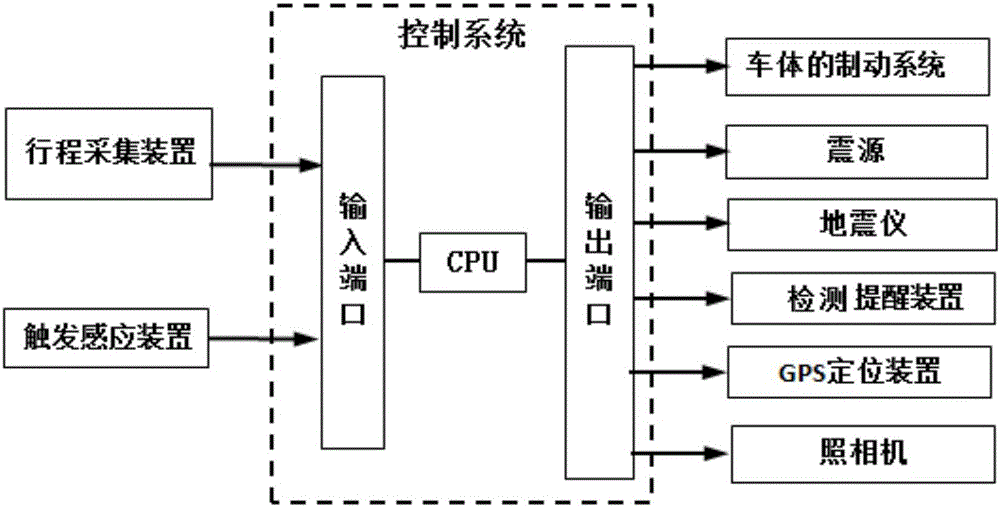
[0095] Described control system 2, seismograph 3 and percussion device 4 and seismic source motor 5 are located in the car body 1, and described control system 2 is connected with seismograph 3 and percussion device 4 of seismic source and seismic source motor 5 and this trigger induction respectively by line. The device 8 is connected; the trigger sensing device 8 is connected with the seismograph 3 through a signal transmission line;
[0096] Describ...
Embodiment 2
[0118] The difference between this embodiment and embodiment 1 is:
[0119] The magnetoelectric sensor of the trigger induction device 8 arranged on the seismic source is omitted;
[0120] In step S3, the seismograph is activated by the signal given when the impact device hits the ground, starts to collect data from the seismic sensor, and at the same time sends a signal to the control system to use this as a time reference point, and measures the seismograph to start collecting data. The length of time t, after the time t is completed, the seismograph stops collecting data, the output port of the control system outputs the electronic brake off signal and the driving switch start signal, and the car body moves.
Embodiment 3
[0122] The difference between this embodiment and embodiment 1 is:
[0123] 1) As shown in Figure 6, the car body 1 of the probe car in this embodiment is a towed car body with other electric vehicles as the tractor, and a four-wheeled electric scooter for the elderly with a traction power of 1000 watts is specifically selected as the tractor , by traction lock 10 between the tractor and the car body without walking power, carrying the seismic source and the seismograph, the rigidity is dragged and hung on the bumper behind the tractor.
[0124] 2) In this embodiment, the probe vehicle control system 2 adopts a notebook combined with an FPGA with multi-channel digital I / O ports as the control system hardware, keeps the original control system on the tractor vehicle, and incorporates the probe vehicle control system 2 into the traction vehicle. The vehicle body walking power control system 9 of the car.
[0125] 3) The detection car in embodiment 1 only has a state of subgrade...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More