

Station layout and motion time cooperative optimization method for six-freedom-degree robot
A motion time and collaborative optimization technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
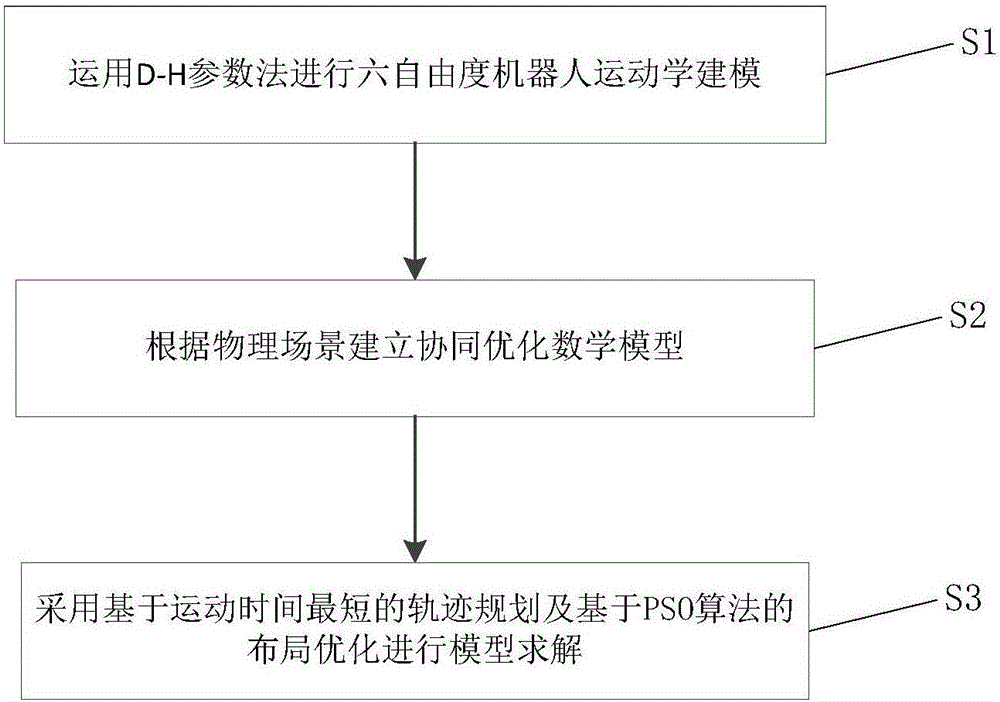
[0079] Such as figure 1 As shown, a six-degree-of-freedom robot station layout and motion time collaborative optimization method is used to control the end-effector of a six-degree-of-freedom robot to move from the starting device to the target device, including the following steps:
[0080] S1: Establish a space Cartesian coordinate system with the six-degree-of-freedom robot as the origin, and use the D-H parameter method to model the kinematics of the six-degree-of-freedom robot to obtain the robot's kinematic equations. Among them, the D-H parameter method is a matrix method prop...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More