

Low energy consumption micro underwater detection robot and control method based on sonar remote control
A robot and low-energy-consumption technology, applied in the direction of three-dimensional position/channel control, etc., can solve the problems of inability to realize round-trip information transmission and real-time control, shorten the working time of underwater detection robots, detection distance and detection environment restrictions, etc., to reduce energy consumption Effects of consumption, increased detection time, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
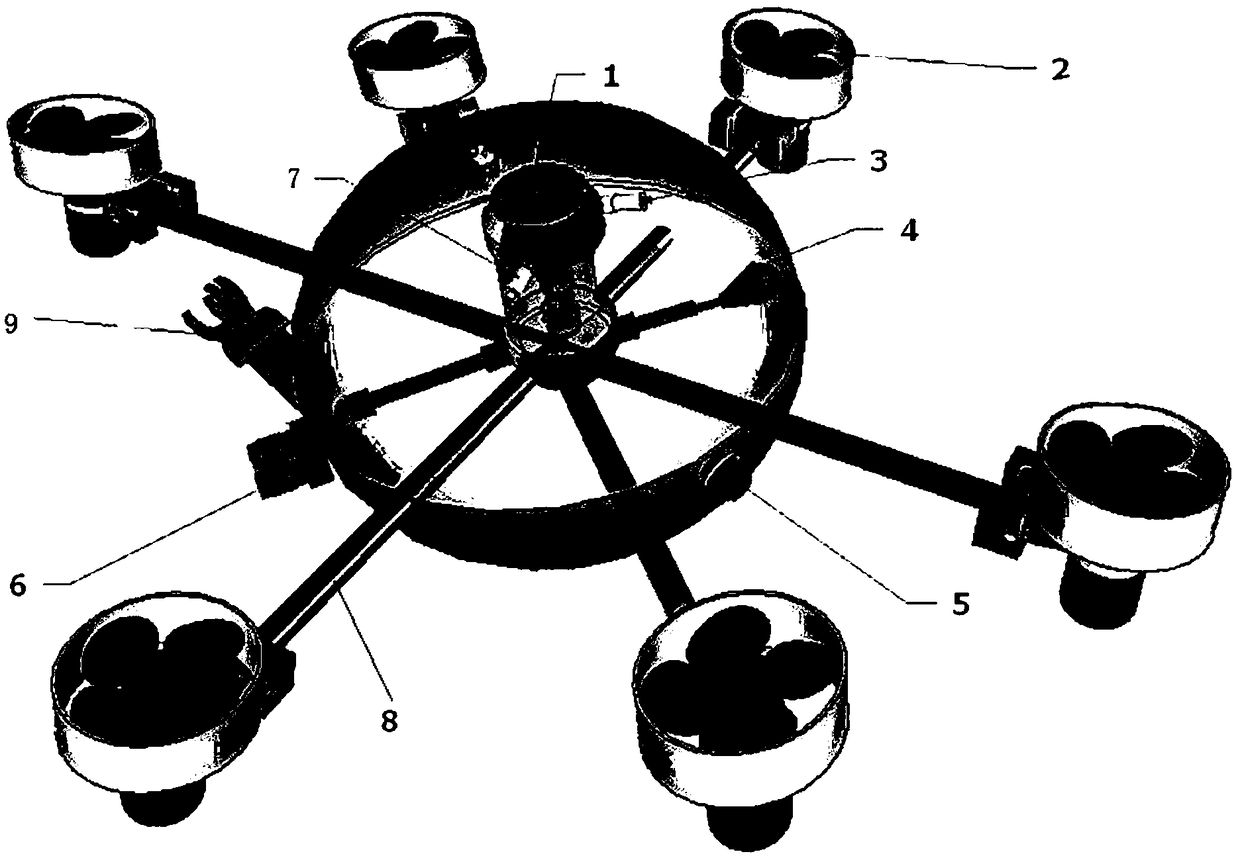
[0030] A low-energy miniature underwater detection robot based on sonar remote control, which includes a mechanical structure and a hardware control structure, such as figure 1 and figure 2 shown; among them,
[0031] The mechanical structure includes a plastic shell, with a number of power shafts 8 connected to the plastic shell centered on the plastic shell, each power shaft 8 is provided with a propeller 2, a pressure sensor 5 is installed outside the plastic shell, and a pressure sensor 5 is installed inside the plastic shell. Gyroscopes and telescoping pumps for telescoping the size of the plastic case4;
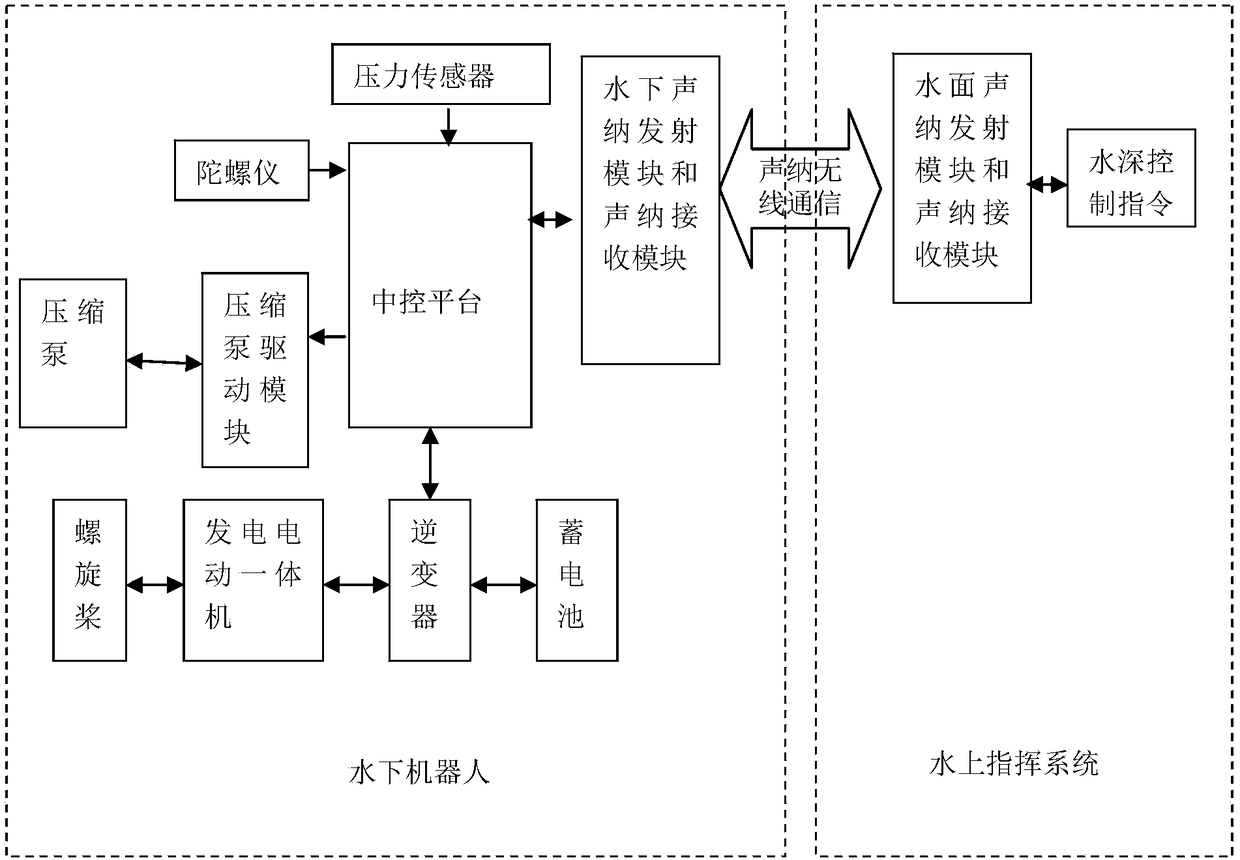
[0032] The hardware control structure includes a central control platform 1, an inverter, an integrated generator and electric machine, a storage battery, a telescopic pump drive module, a sonar transmitting module 3 and a sonar receiving mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More