

High-precision map data registration relationship determination method and device
A technology for determining map data and relationships, applied in the field of data processing, can solve problems such as low measurement accuracy and multiple workloads, and achieve the effects of reducing workload, improving accuracy, and improving user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
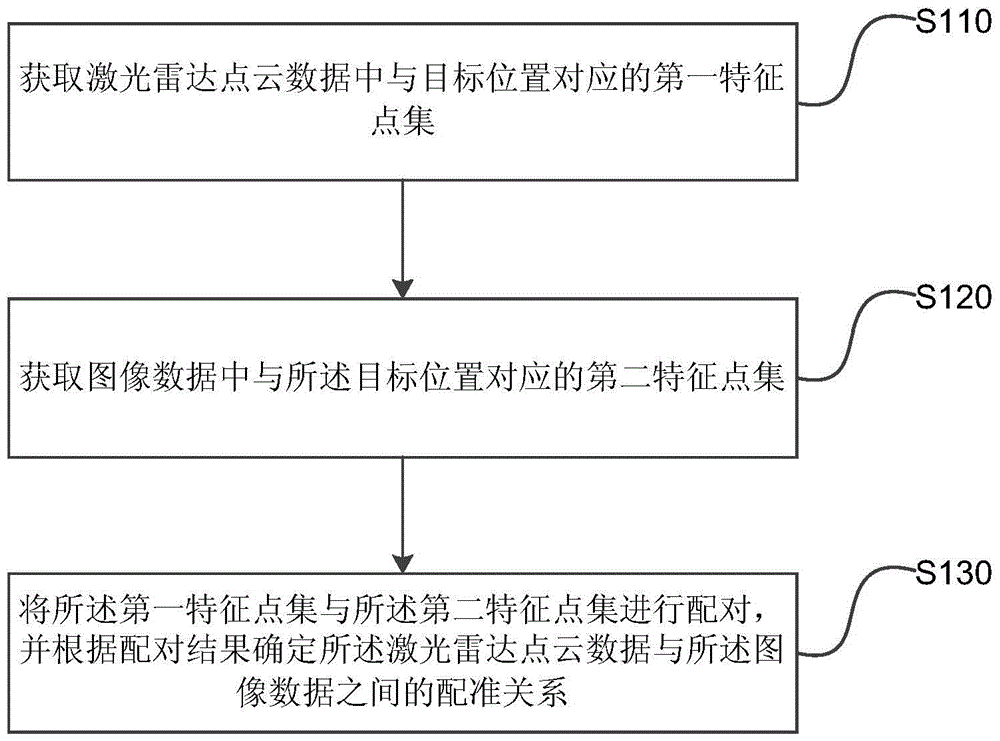
[0024] Embodiment 1 of the present invention provides a method for determining a registration relationship of high-precision map data. The method can be executed by a device for determining a registration relationship of high-precision map data, wherein the device can be implemented by software and / or hardware. figure 1 It is a flow chart of the method for determining the registration relationship of high-precision map data provided by Embodiment 1 of the present invention. Such as figure 1 As shown, the method specifically includes the following operations:
[0025] S110. Acquire a first feature point set corresponding to the target position in the lidar point cloud data.
[0026] Lidar is a radar system that detects the position, speed and other characteristics of the target by emitting laser beams. It is generally composed of a transmitting system, a receiving system, and information processing. Among them, the transmitting system is usually composed of lasers (such as c...
Embodiment 2
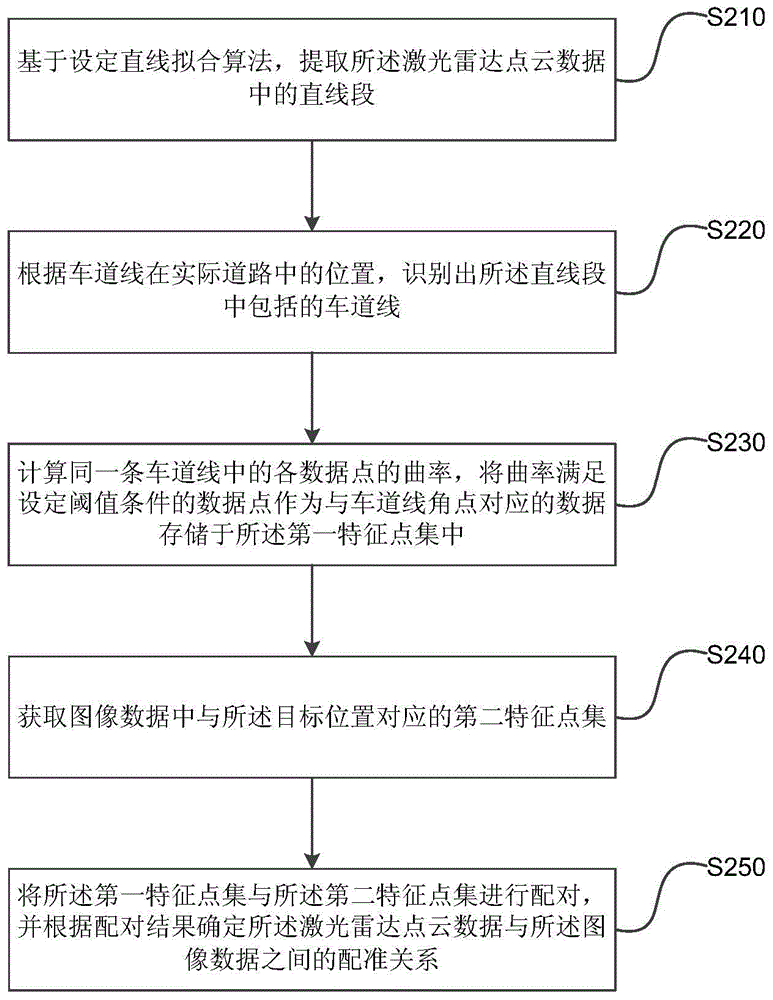
[0045] Embodiment 2 of the present invention provides a method for determining the registration relationship of high-precision map data. This embodiment is optimized on the basis of the above embodiments. In this embodiment, the points corresponding to the target position in the laser radar point cloud data The specific optimization of the first feature point set is: based on the set straight line fitting algorithm, extracting the straight line segment in the lidar point cloud data; according to the position of the lane line in the actual road, identifying the lane included in the straight line segment line; respectively calculating the curvature of each data point corresponding to the same lane line, and storing the data points whose curvature satisfies the set threshold condition as the data corresponding to the corner point of the lane line in the first feature point set.
[0046] figure 2 Shown is a flow chart of the method for determining the registration relationship of...
Embodiment 3
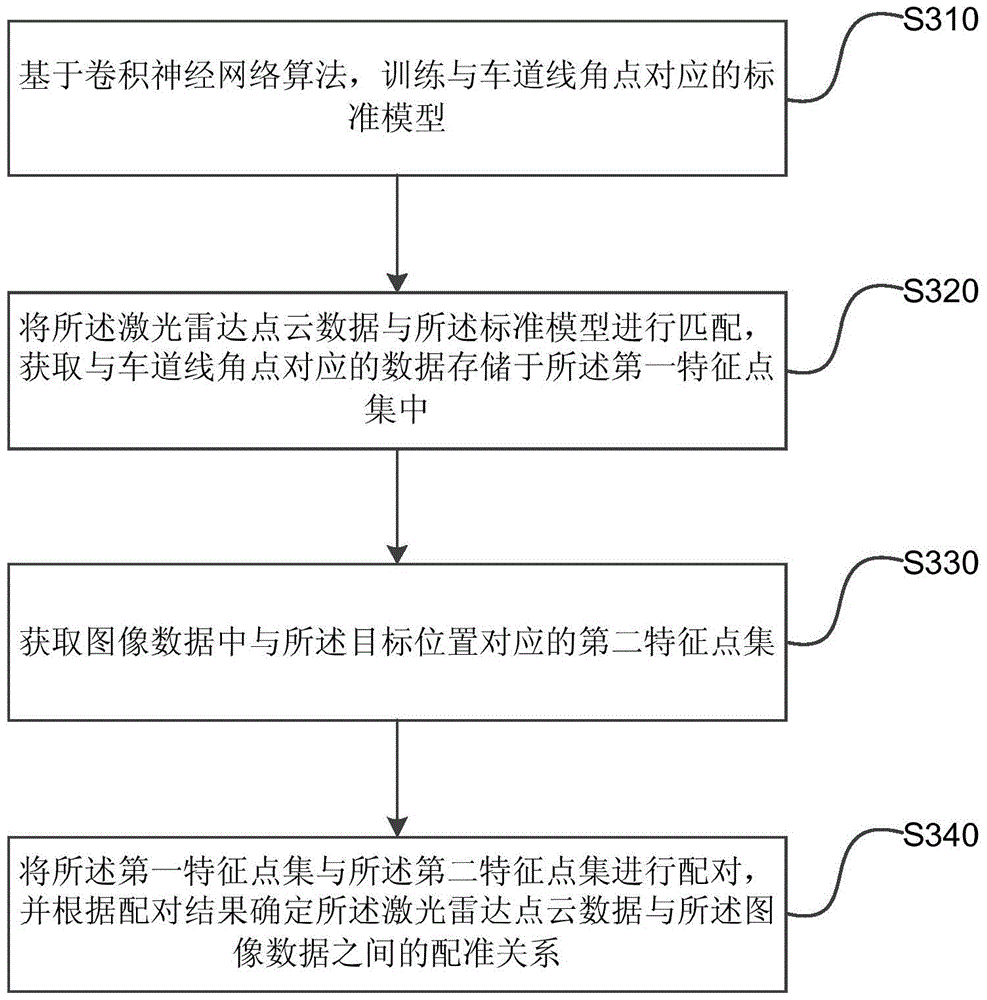
[0057] image 3 It is a flow chart of a method for determining the registration relationship of high-precision map data provided by Embodiment 3 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments. In this embodiment, the obtained lidar point cloud data and The specific optimization of the first feature point set corresponding to the target position is as follows: based on the convolutional neural network algorithm, train the standard model corresponding to the lane line corner; match the lidar point cloud data with the standard model, and obtain the The data corresponding to the corner points of the line is stored in the first set of feature points.
[0058] Correspondingly, such as image 3 As shown, the method provided in this embodiment includes the following operations:
[0059] S310. Based on the convolutional neural network algorithm, train a standard model corresponding to the lane line corners.
[0060] Convolution...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More